I think perhaps the individual pixels for the UI might be a bit too clunky ...
but its nice to know the update to MrlComm can handle 8x32 matrix.
Needs to have a scroll text function ... hmmm
I think perhaps the individual pixels for the UI might be a bit too clunky ...
but its nice to know the update to MrlComm can handle 8x32 matrix.
Needs to have a scroll text function ... hmmm
Good Day everyone,
Hope every one is well and healthy. I am trying to write a program for kinematics of the left hand without using myrobotlb. I already have the DH parameters as below.
Hi guys,
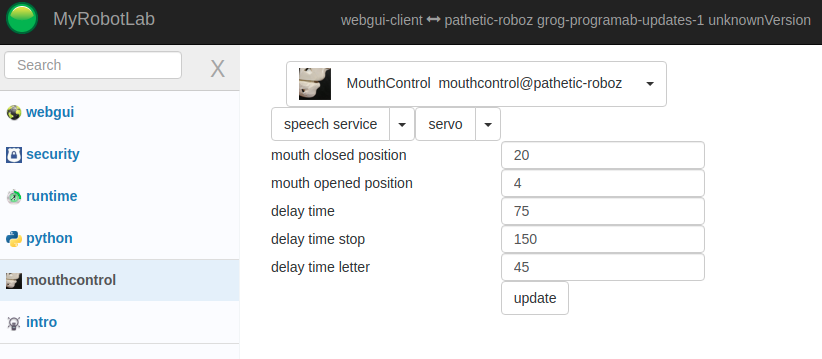
@Gael, I think something like this would be good - I'm close to finishing it out, but I want https://github.com/MyRobotLab/myrobotlab/pull/921 merged in first, because it makes getting the valid list of future and existing speech services and servos much more clean.
Changes in the UI can/will be saved out through config, and loaded if desired.
Hello again.
I'm using 1.1.557. I created the arduino and servo services. While testing in servo service page in the web gui, after 3 or so movements the servo and page takes sometime to respond. In the terminal page, it's immediate.
doing the same test in the swing GUI, it works correctly.
so question 1 - is this a known bug?
question 2 - where do we look for known bugs?
question 3 - how do we report a bug?
thanks for assistance in advance and the work you all do
Hello,
I have the current version of manticore running on a mac. the swinggui displays right, but when going into webgui, alll i see is a blank screen. i have put in a no worky report
osx version10.11.6
chrome version 92.0.4515.159
2.4 GHz Intel Core 2 Duo
I would just like to say hello.
I have just started my printing of the InMoov Robot (eyes) and ordered some servo's
Tiny

.png)