I have tried to get OpenCV working on MRL (ver 1.1.823) with a Mac without success, is there a set of instructions or tutorial that I could review - I am new to this and would appreciate some help. Thanks.
This is now sorted - moved to Nixie build.
I have tried to get OpenCV working on MRL (ver 1.1.823) with a Mac without success, is there a set of instructions or tutorial that I could review - I am new to this and would appreciate some help. Thanks.
This is now sorted - moved to Nixie build.
Hello everyone
I want to run inverse kinematics service with Inmoov Virtual
So i try to use the service in this repo
https://github.com/MyRobotLab/pyrobotlab
But some service work and other not
And keep tell me "" Module not found "
I'm using Ubuntu 20.04 & python 3.8 and
I install python 2.7
But inverse kinematics service not working
Is anyone have a solution???
Thank you
After install WebGUI fails to load correctly
I tried a restart of windows ........ no changes
I'm trying to use Windows Remote Connection but the same problem occurs using a direct connection.
win10-Pro / java version "17.0.1" / myroborlab 1.1.820
Chrome tries to go to http://localhost:8888/#/tabs
reports --
briefly says sent no data then switches to
Hi Guys
I strugle a bit and do not know how to sort this. The robot begin to talk nice . Afther 2 or three words , robot finish it sentence but mouth stops talking. Why. i dont know how to fix this
I use Nixie
Greetings
Adolph
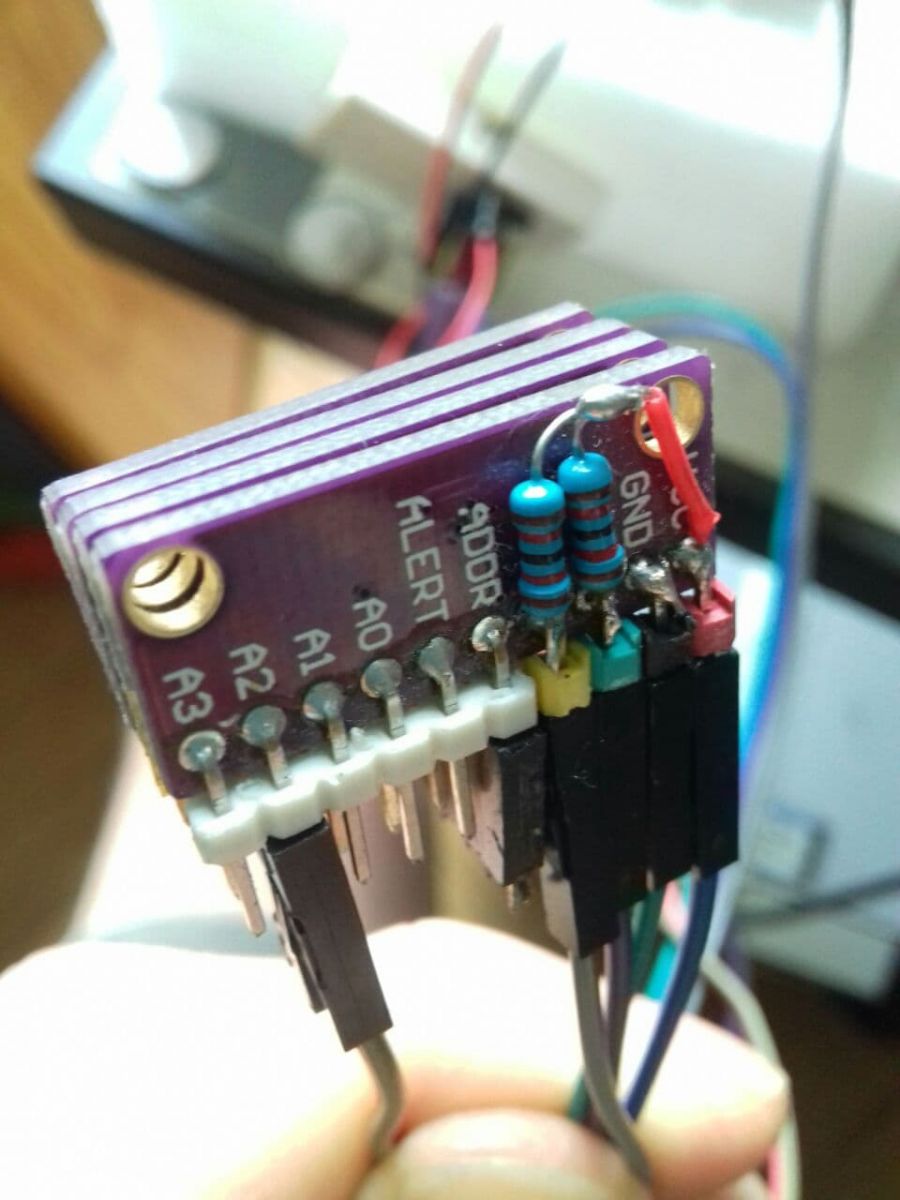
Here are some details of how I cobbled up a 16 channel ADC rig for use with MRL's Ads1115 service
As you can see above the i2c SDA/SLA lines require 10k resistors as pull up loads.
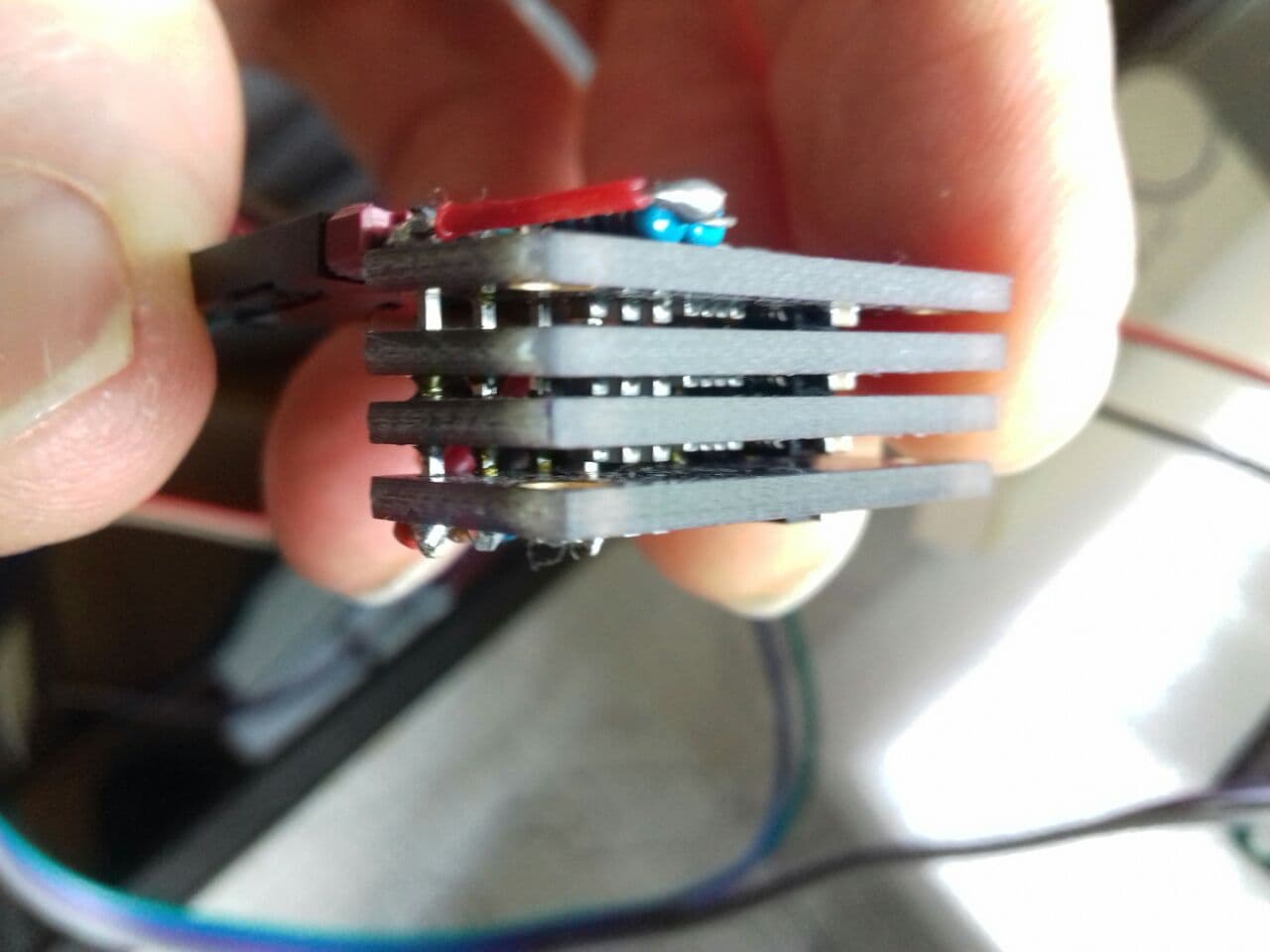
The trick to keeping it compact is to the stack and common through the GND,SDA,SCL,VCC pins (see below)

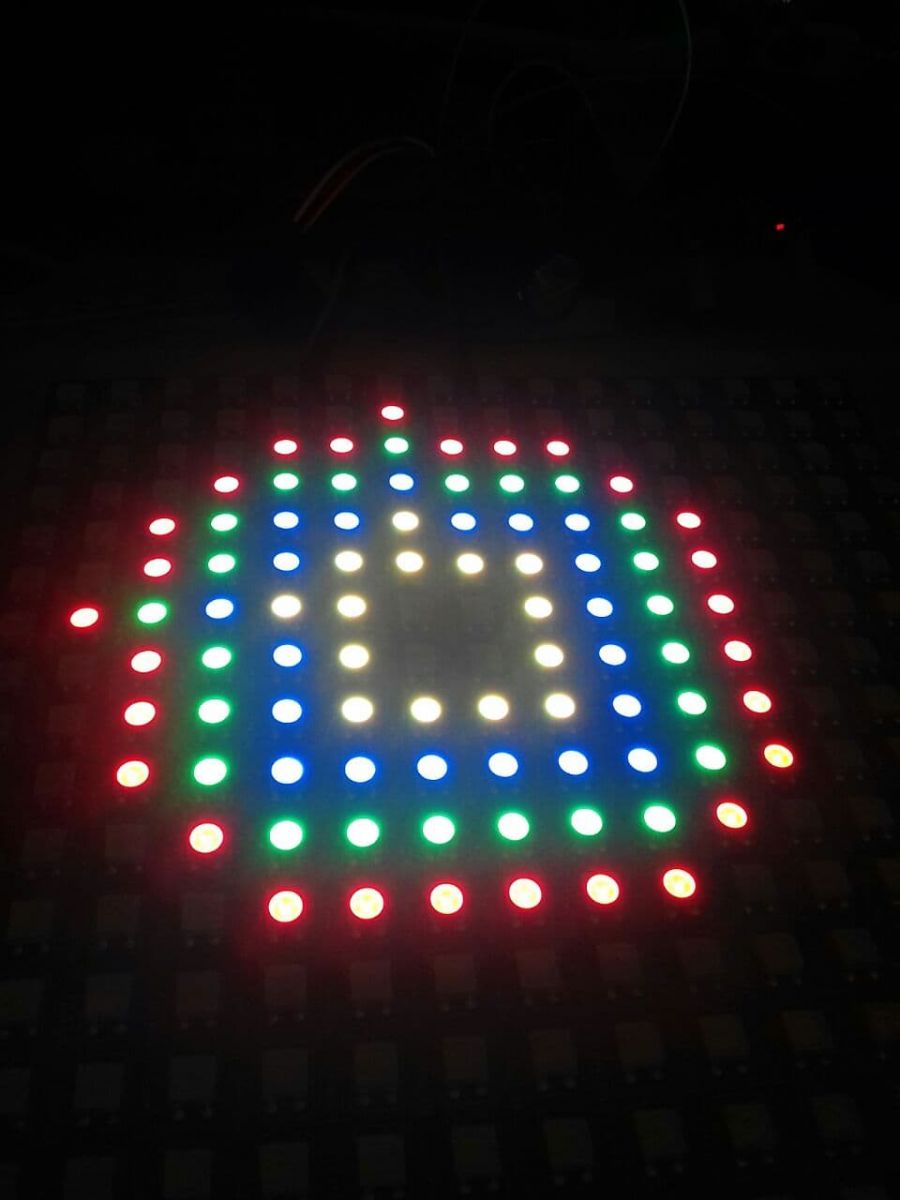
Plotting character sets to the Neo_Pixel Service.
Numbers can be fitted into a 4x5 (with a little flare) matrix, so here is a simple set based in Python to get you going.
Worthy of note is Python has a triple """ option for text declaration, which means you can include new lines in the text input, so I was able to separate the character bitmaps to some degree.
Usage :-
Python code to enable x,y plotting from the neopixel service, an inviting rabbit hole.
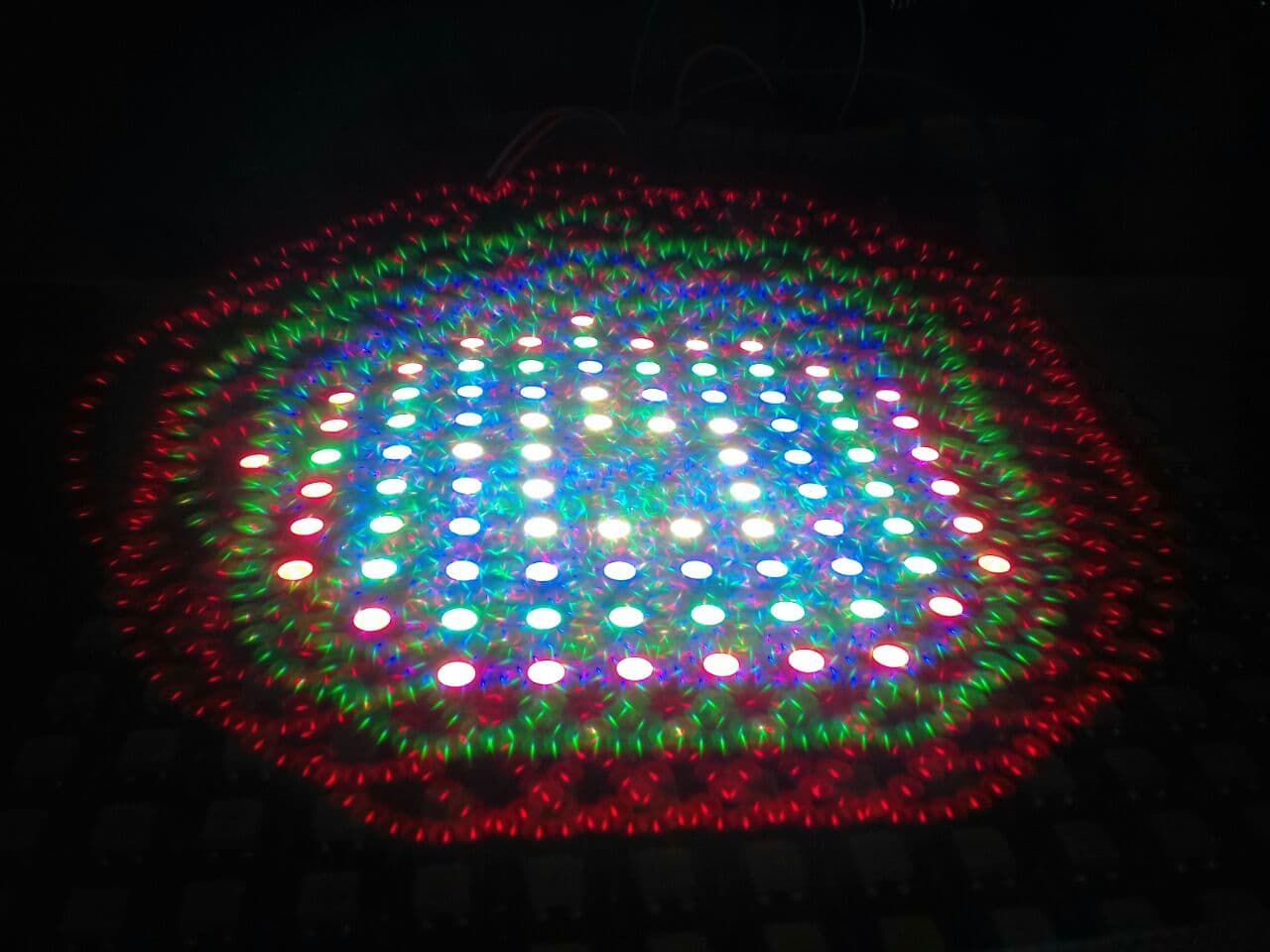
Many Matrix displays have a serpentine LED pattern. This means that odd and even columns are reversed.
Can anyone show me where I can find information about how openCV is integrated in MRL?
I try to get openCV to run on Ubuntu 20.4. With manticore version when capturing a frame webgui freezes, no interaction is possible. With nixie, there is an error message "could not get valid frame".
Which version of the openCV libraries has to be installed in the system? What python scripts for openCV come with the installation of MRL and where can I find them?
Thanks for any support
gule
 .
.