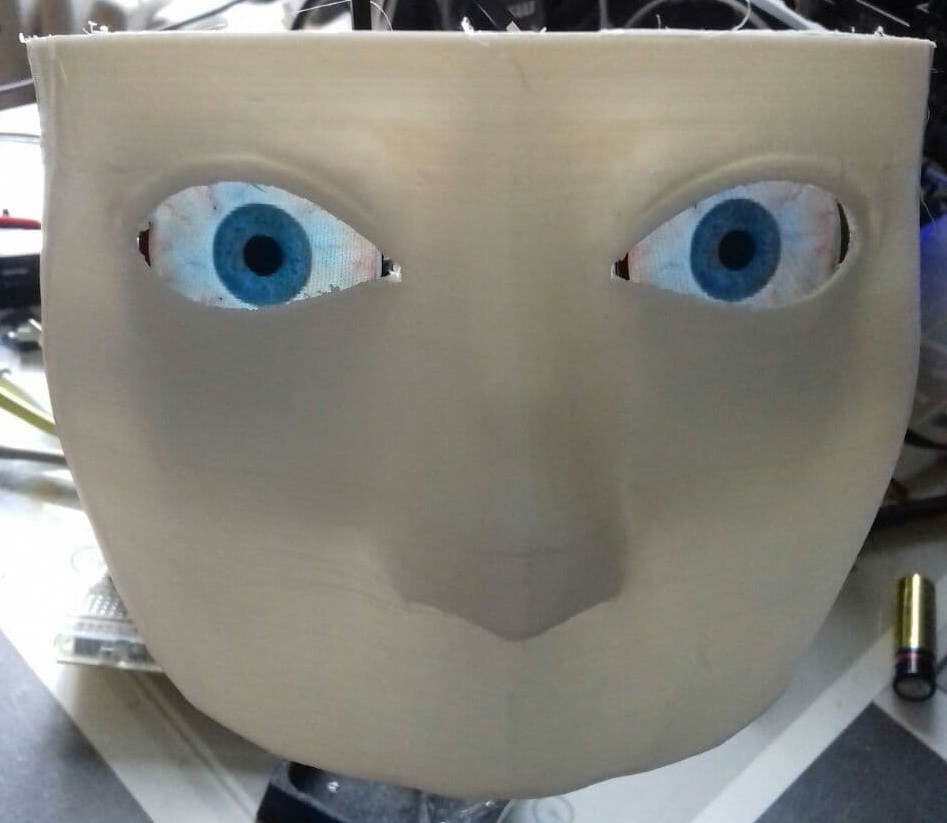
I Picked up a couple of round 240*240 pixel OLED display modules, as luck would have it they scale easily into the InMoov face frame-work.
Driving the display is an ESP32 using SPI bus for control... meaning that two displays can be controlled with it.