Bonjour,
j'ai recement telecharger Java version 1.8.0_151 64 bits car mon systeme est en 64 bits, depuis MyRobotLab bloque au chargement du service D_OpenCv.py mais sur FAlse dans le fichier de config.
Bonjour,
j'ai recement telecharger Java version 1.8.0_151 64 bits car mon systeme est en 64 bits, depuis MyRobotLab bloque au chargement du service D_OpenCv.py mais sur FAlse dans le fichier de config.
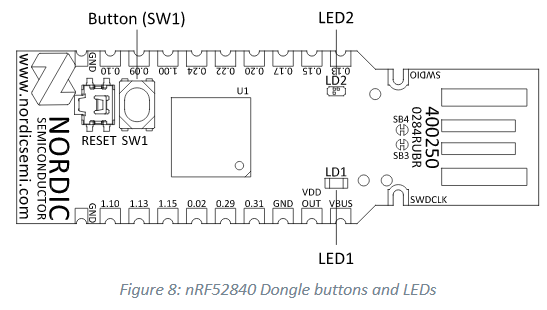
There are two common nRF "Mini" development boards available namely :-

|
Based off the Bog standard "Blinky "Example contained in the NRF SDK :- C:\nRF5_SDK_17.0.2_d674dde\examples\peripheral\blinky\pca10059\mbr\ses\blinky_pca10059_mbr.emProject |

|
Based off the Bog standard "Blinky "Example contained in the NRF SDK :- C:\nRF5_SDK_17.0.2_d674dde\examples\peripheral\blinky\pca10059\mbr\ses\blinky_pca10059_mbr.emProject |
Hi Guys,
the more i dive into robotics, the more i feel the need to use stepper motors.
Especially on the inmov head/neck it could be a cool option to remove the servo noises, also steppers are pretty cheap, thanks due to 3d printing massproduction :) Sure the code would need a lot of adjustment, and positioning is also a challange, end stops, hall sensors, but its fun! :)
I know this topic was there in the past already, whats the current situation, is it work in progress?
I just purchased my first 3D printer about 2+ months ago as a COVID stay sane self-isolation distraction. Recently I discovered InMoov and thought that would be a good project to occupy my stay at home time with. I have worked with Arduinos and Rasp PIs and thought this would be engaging on many different levels.
I started documenting my project here on instagram: https://www.instagram.com/phodara/
I have a background in the arts and in I.T.