https://www.youtube.com/watch?v=Zg243gvONo0
Astro - sorry for the tragic end of your servo :(
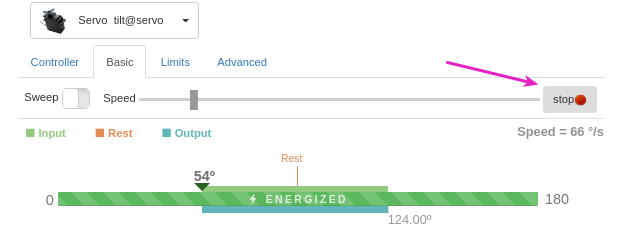
I can tell you the sweep could not be stopped, now it can with build 191 and I've added a stop button which "should" stop the servo from any movement.
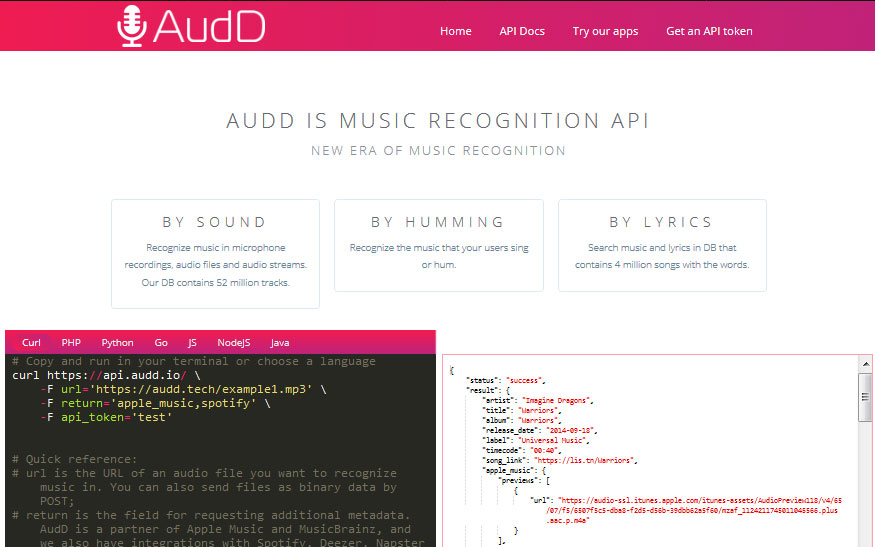
I don't know if this topic has already been discussed, maybe in the future music recognition can be added
Hey, i am currently printing out the Inmoov Robot. I want to use a Raspberry PI 4- 4Gb as brain but i have some trouble setting up Myrobotlab at the PI. I already installed the 64bit Rasperry OS Image on a SSD, installed Java64Bit and Myrobotlab. My problem is, i can't set the Com Port for the (left) Arduino.

What's Left ?
I already fixed a bug Gael pointed out regarding autoDisable happening too soon in a long move. But, this bug flushed out another bug, I call it "Disable to Crazy Move".
It was easier to reproduce when the autoDisable bug was still causing problems, but you can reproduce it currently by doing the following.
1. Create a long move .. This can be done by :
2. Setup an Arduino & Servo
3. Set speed to 10
4. Start the servo at 0 move it to 180
5. While the servo is moving - disable it.
I found a bug in the invert, it deactivates itself by touching the input or output limits
Hi Astro.
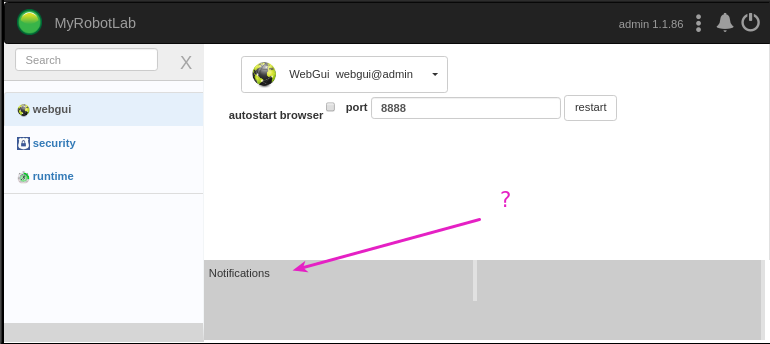
I was wondering if there were plans for this Notifications area - and I guess I was trying to figure out if I incorrectly merged. Yesterday we managed to merge webgui_work and meta branches into develop. Which is 100s of changes from different people into the soup pot (develop). I am wondering if I spilt some soup in the process ?
Hidden inside the ESP32 package tin foil hat is a "Hall Effect" sensor ....go figure!!!.
A simple analogue read Hal=halRead() , reveals values from -255 to +255 (however 12 bit is possible accessing the Hall-effect chip via i2c)
Usage list :-
Hello all! I have been following the InMoov and MyRobotLab projects for a couple years now. This was the main reason I bought a 3d printer and I started with a hand and forarm. Then life got busy and I took a break for a bit. Since the beginning of the year I have been plugging away on the head, torso and shoulders.