Having that button is good, but I didn't know which servo was working at the time the servo burned out. At one point I heard a slight buzz, I thought it was the finger I was calibrating, I did not realize which servo was enable, I think that was the problem, when I arrived to calibrate the wrist, it was late and when I noticed that it did not move I touched it and it felt warm and the smell.
I noticed that something runs at startup that shakes the servos, before it loads the entire webgui. So now I wait for it to load and then I give it power. I'll be more alert to unplug everything.
RIP wrist:
I don't remember the sequence, but it could be that since it took a long time to show "detach" when I press "attach", (you can see in the video, I press "attach" and nothing happen, but is attached)
I thought that it had not worked and I continued with the fingers and it could be that the wrist was left in "attached" and "enable" by default, without setting the limits and it kept trying to reach a physically impossible position while I calibrated other servos. And when I wanted to calibrate the wrist it was too late. Now I think clearly that it was not related to the Sweep bug, but to the delay in the interface to show the status of the attach button. I left it attached and it burned. I think maybe Autodisable was not connected .
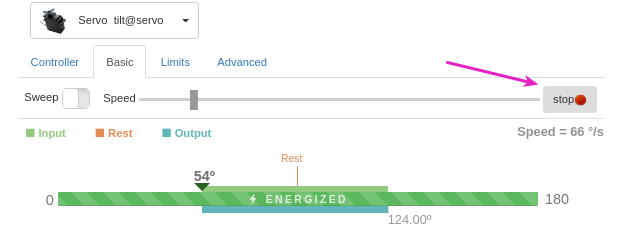
I think it would be a good idea to have a stop all servos button next to the Shutdown button, so you don't have to go through each servo in the interface if there is a problem and you don't know which one is activated.
In any case, it is always safer to disconnect the power.
My problem was that I didn't realize what was happening.
For InMoov
An idea could be that when it's run for the first time, it asks if you want to calibrate each servo (the safest and recommended) or load a default configuration (dangerous because nobody has the same settings). Going step by step trough the calibration process of the active part of InMoov. Thus beginners have the opportunity to set the limits of the servos one by one, preventing any other servo from being activated by any script. If it didn't go through the set limits part, it can't be activated. There are few servos that I think can go from 0 to 180, so there is a high probability that something will break or burn if the limit is not set.
The "load system" button loads a default configuration which doesn't activate the servos. (ini files)
Once you go through each part (hand, arm, etc...) and press "save Config", it will save over the default configuration, therefore, the next time you press "load system" it will takes all your new settings and calibrations. But this is yet to be done, I encounter a lot of problem creating the script for saving the python file with all the necessary settings.
InMoov already has a panic voice command to turn off all servo at once, just say "Disable".
Maybe I could add a general panic button on the InMoov webgui. although I think it should be even more general than only for InMoov.
Thanks GroG!! Having that
Thanks GroG!!
Having that button is good, but I didn't know which servo was working at the time the servo burned out. At one point I heard a slight buzz, I thought it was the finger I was calibrating, I did not realize which servo was enable, I think that was the problem, when I arrived to calibrate the wrist, it was late and when I noticed that it did not move I touched it and it felt warm and the smell.
I noticed that something runs at startup that shakes the servos, before it loads the entire webgui. So now I wait for it to load and then I give it power. I'll be more alert to unplug everything.
RIP wrist:
I don't remember the sequence, but it could be that since it took a long time to show "detach" when I press "attach", (you can see in the video, I press "attach" and nothing happen, but is attached)
I thought that it had not worked and I continued with the fingers and it could be that the wrist was left in "attached" and "enable" by default, without setting the limits and it kept trying to reach a physically impossible position while I calibrated other servos. And when I wanted to calibrate the wrist it was too late.
Now I think clearly that it was not related to the Sweep bug, but to the delay in the interface to show the status of the attach button. I left it attached and it burned. I think maybe Autodisable was not connected .
I think it would be a good idea to have a stop all servos button next to the Shutdown button, so you don't have to go through each servo in the interface if there is a problem and you don't know which one is activated.
In any case, it is always safer to disconnect the power.

My problem was that I didn't realize what was happening.
For InMoov
An idea could be that when it's run for the first time, it asks if you want to calibrate each servo (the safest and recommended) or load a default configuration (dangerous because nobody has the same settings). Going step by step trough the calibration process of the active part of InMoov. Thus beginners have the opportunity to set the limits of the servos one by one, preventing any other servo from being activated by any script. If it didn't go through the set limits part, it can't be activated. There are few servos that I think can go from 0 to 180, so there is a high probability that something will break or burn if the limit is not set.
Thanks for the update. I
Thanks for the update. I agree with being able to add servo by servo if desired, checking each as you go. This new design change http://myrobotlab.org/content/new-inmoov-architecture-embrace-your-pubsub would allow you to do that.
Hello Astro, The "load
Hello Astro,
The "load system" button loads a default configuration which doesn't activate the servos. (ini files)
Once you go through each part (hand, arm, etc...) and press "save Config", it will save over the default configuration, therefore, the next time you press "load system" it will takes all your new settings and calibrations. But this is yet to be done, I encounter a lot of problem creating the script for saving the python file with all the necessary settings.
InMoov already has a panic voice command to turn off all servo at once, just say "Disable".
Maybe I could add a general panic button on the InMoov webgui. although I think it should be even more general than only for InMoov.