
I leave this screen as an idea.
I don't know if there is a service for this or it has to be part of Servomixer. I'm not sure if this is a gesture service.
I leave this screen as an idea.
I don't know if there is a service for this or it has to be part of Servomixer. I'm not sure if this is a gesture service.
Here is a snapshot of how RoboJango conversates. I am not using a standard DNN, rather something that I have been contemplating for a long, long time. It will mimic a self organizing DNN, when all the assoications are in place among the objects, and their firing functiions are weighted properly.

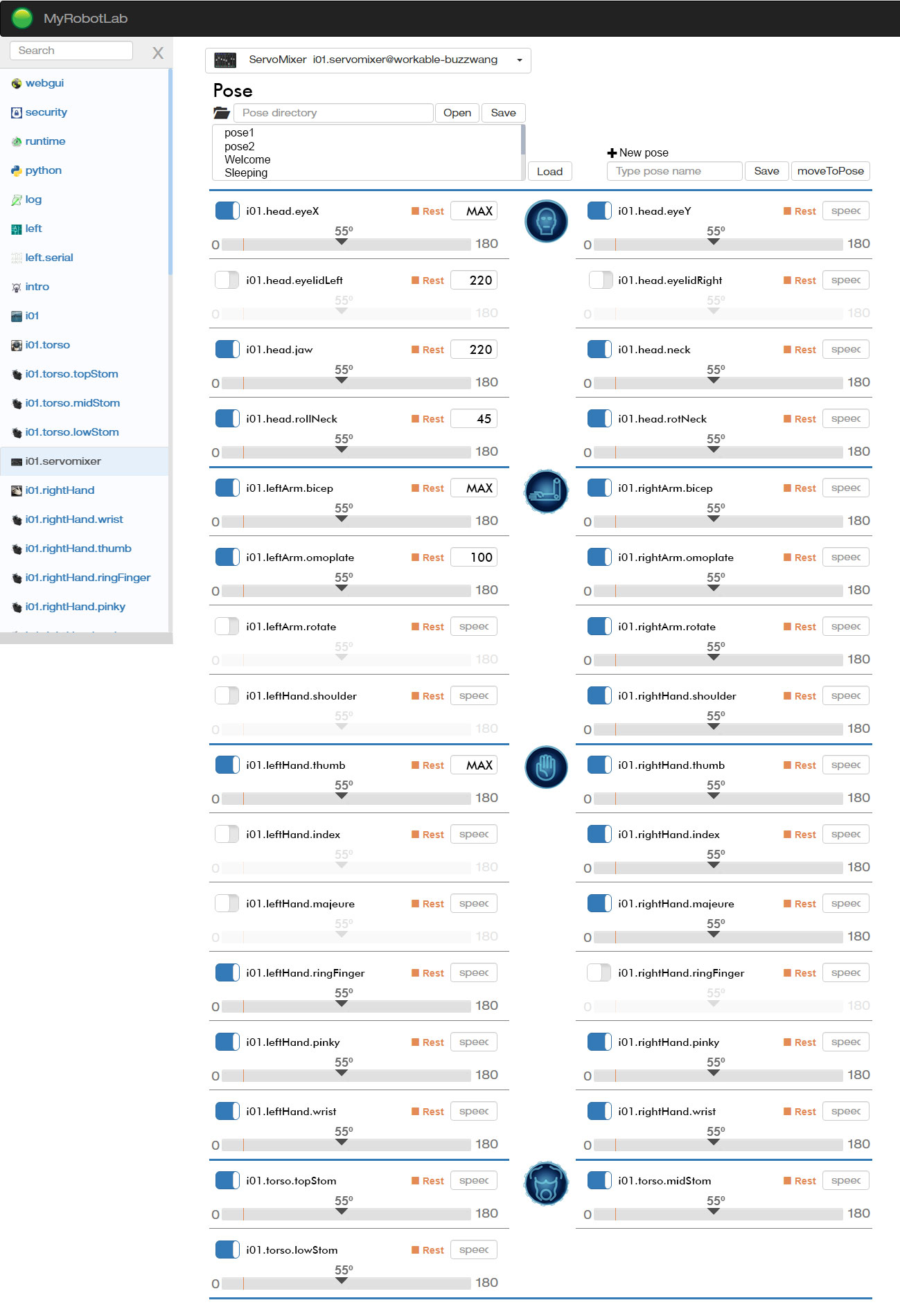
These buttons were dynamically created from meta data in the WorkE robot service. More complex services usually contain meta data describing peers. Meta data is just a plan or design on what services a robot knows how to create and attach to. The buttons are like an instruction manual.

Hey, guys! I haven't posted here in a while... but always taking a look at what's going on. I hope everyone is okay.
This is my latest project (mechDOG):
Tell me what you think.
I don't know if I can get the sliders in that order.
Maybe it's very InMoov-oriented and should be more generic for MRL.
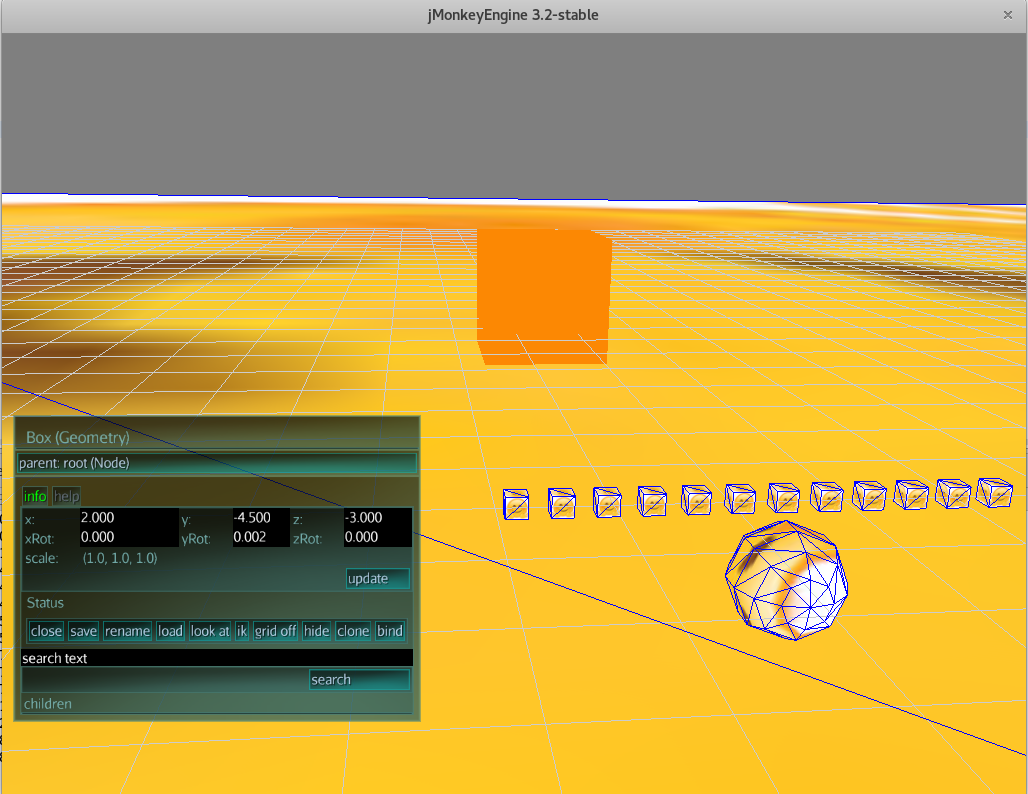
I believe I've loaded JBullet Physics into our JMonkeyEngine simulator service ...
Cool, I think those cubes and ball are waiting to be thrown around or kicked - Just got to figure out how to do it ...
I've just started to refactor and clean up the JMonkeyEngine service ... is very nice you don't need a Servo controller to make servo move in the simulator anymore (YAY!!!)
I think the problem could be in MRLCOMM
Going back some time ago, I created a tutorial here on setting up MRL on the Raspberry Pi.
Since then, the version of the Rasbian system has changed along with a lot of updates, and those instruction are now out of date.
Here is a link to a video starting with loading the OS onto a micro SD card and working your way through to getting Manticore running on the Raspberry pi 3.
So sit back and enjoy.
Ray.
Hi. I am simply having issue starting the Arduino service in mrl through Intellij on my x64 intel cpu desktop PC.
My steps that led to the issue are as follows:
| Internal References - Fragile Skeleton | Pub/Sub - No Internal References |
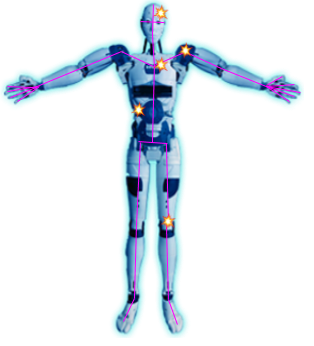 |