Hi All,
Next version 'Nixie' is coming soon !
Help us to get ready with MyRobotLab version Nixie: try it !
Alright Alessandruino is probably going to be me with TLD+ script for MRL. But, I saw something which looked really cool and it looks like a "happy monkey" tutorial !
Grog,
Nice job!
I come from the ROS(Robotics Operating System) world that uses a publisher/subscribe paradigm for doing asynchronous messaging.
How does MRL address asynchronous messaging from multiple devices/sensors?
(also, as a side note: Where/how did you get that "Jarvis" (Iron Man movie) sounding voice that shows up in the Finger tutorial for InMoov? It sounds great!)
Sam
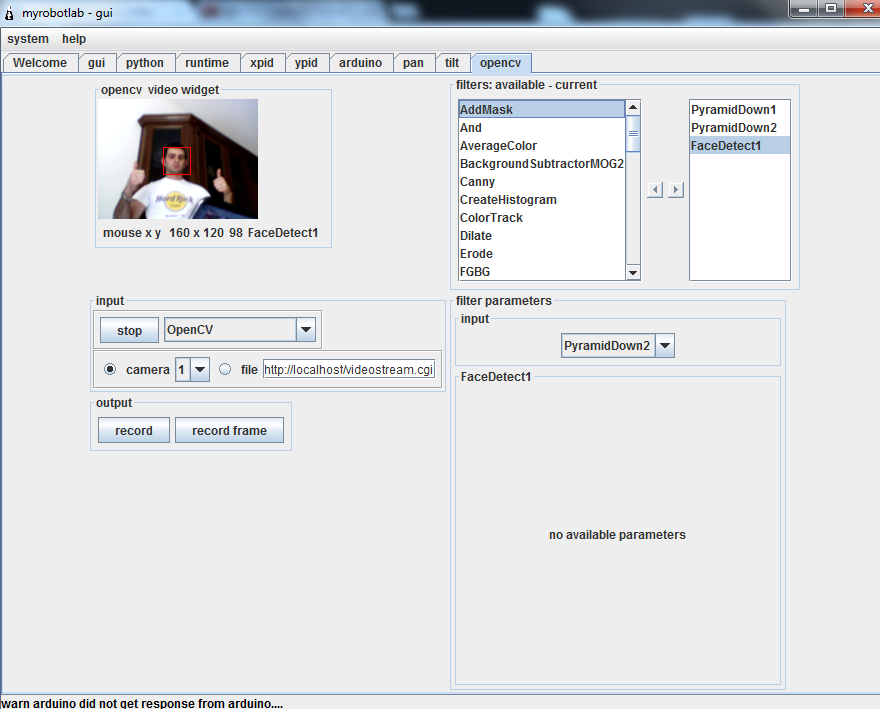
FACE DETECT FILTER IS DETECTING BOTH ME AND "YOUNG ME"
TEMPLATE MATCH FILTER IS LOCKING JUST ME... IT WORKS FINE IF I DON'T MOVE TOO MUCH...

FACE DETECT + TEMPLATE MATCHING COMBO

Services
This tutorial is based on an older version of My Robot Lab (1695) and not the current bleeding edge. You can have more than one version MRL installed/unzipped on your computer.
 Inmoov
Inmoov
Hardware
-
1 X Arduino board
-
1 X servo MG946R or HK15298 or MG995
-
.jpg)
[[Find.humans.py]]
I was given the keys to the kingdom, and got Alessandruino's face tracking script to work.
It's awesome!
[[facetracking.FASTER.py]]
Face tracking with a single OpenCv instance, 2 Pyramid down filters applied, 1 face detec filter...
DALE ! :D :D
[[facetracking.FASTER.py]]
UPDATE 05.21.2013
WHOOOOO HOOOOOOO IT WORKS !!!
HERE IS A VIDEO :D (SOON AVIABLE : IT'S COOKING IN YOUTUBE OVEN)
Here is the code...
When camera see a face, it removes face filter and send face coordinates to tracker service...
I stopped video stream in order to see where to point is setted on the screen...
Here is a collection of references for AI to be incorporated into MRL