This is ED-209, my makerspace's(http://dhmn.net) automated sentry turret gun.
We're working on a redesign of the hardware, but in the meantime I'm using it to experiment with MRL.
This is ED-209, my makerspace's(http://dhmn.net) automated sentry turret gun.
We're working on a redesign of the hardware, but in the meantime I'm using it to experiment with MRL.
I recently downloaded myrobotlab for the purpose of creating the inmoov robot. When I try installing the arduino or any other service it says that is has finished processing updates, but it still says not installed next to the arduino and inmoov services and I am unable to start them. When you right click on them it still only gives the install option, no start. What have I done wrong? What do I need to do?
Here is my attempt to make detector working, first without tracking (only printing Rectangle coordinates)
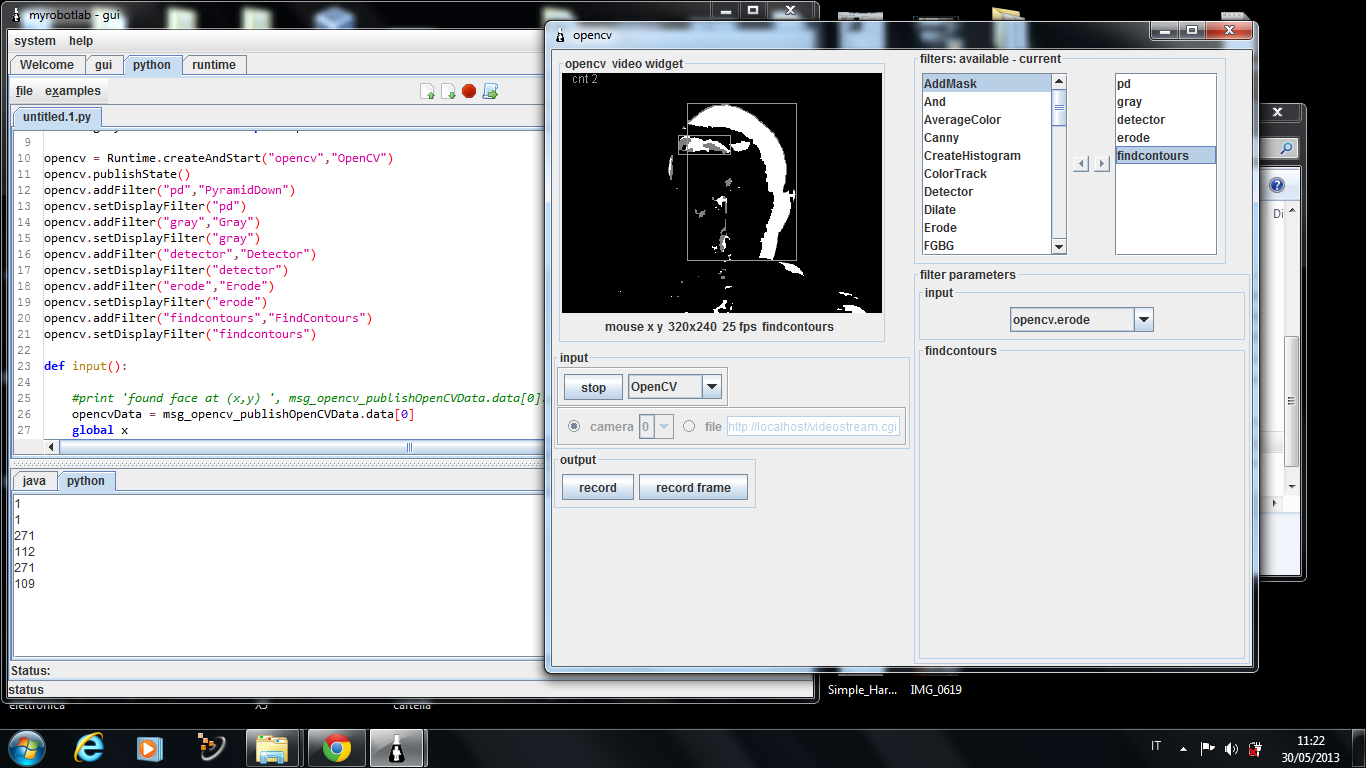
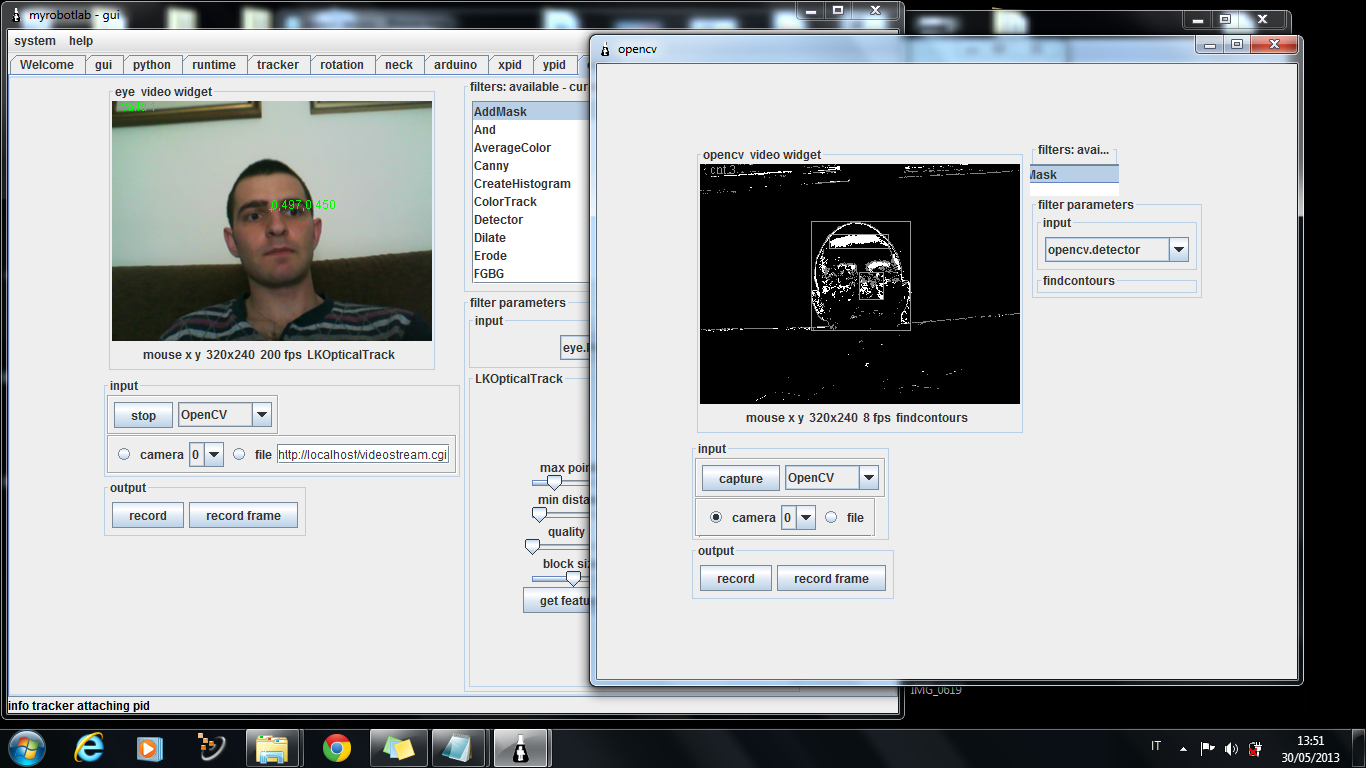
HERE is the second attempt, with tracking (findcontours sends coordinates to lk opticaltrack)

.png)
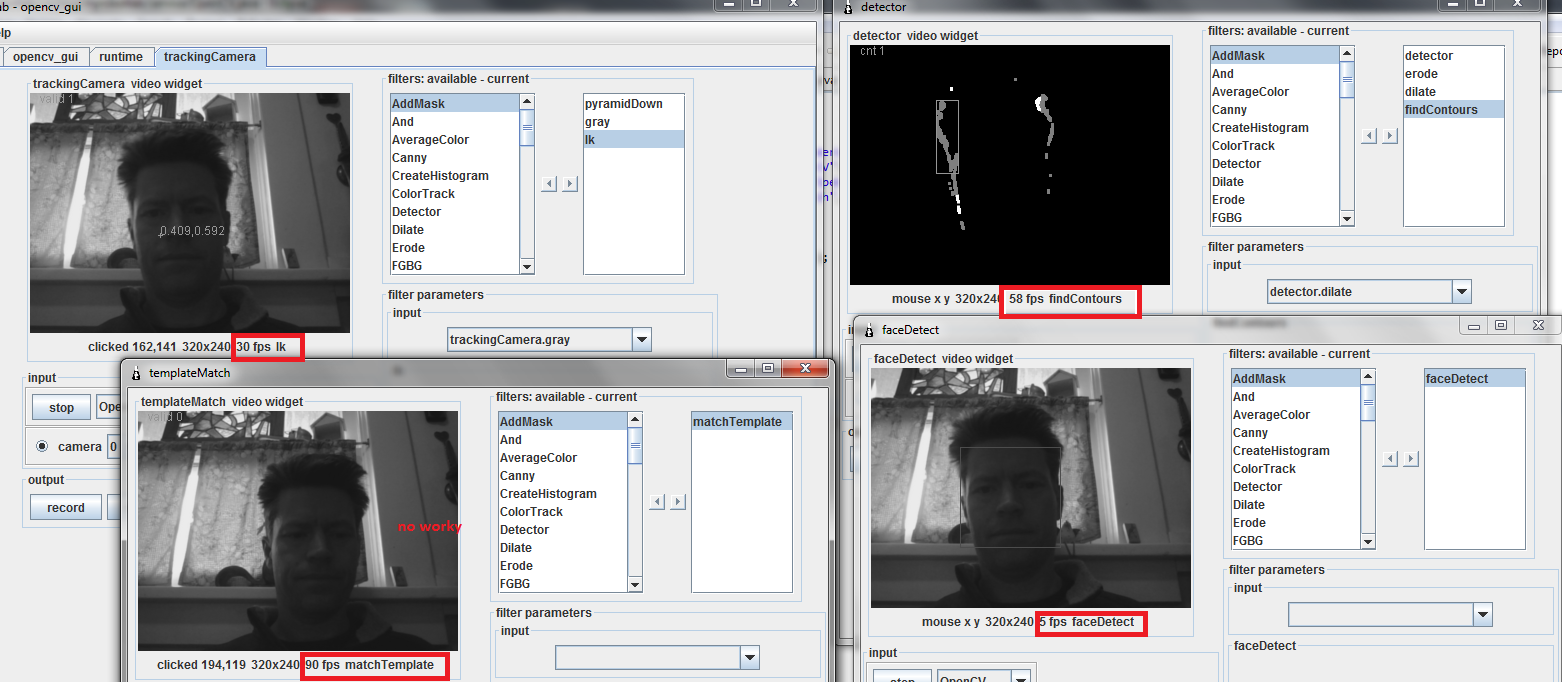
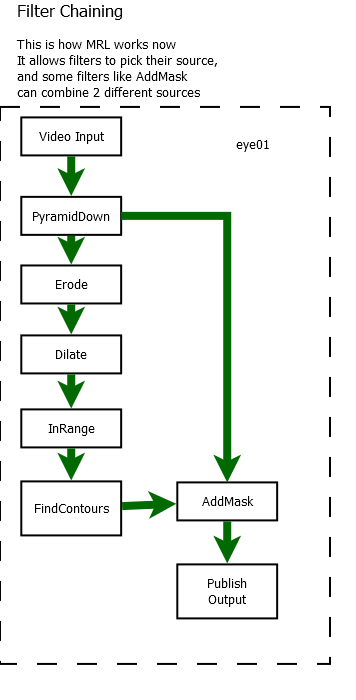
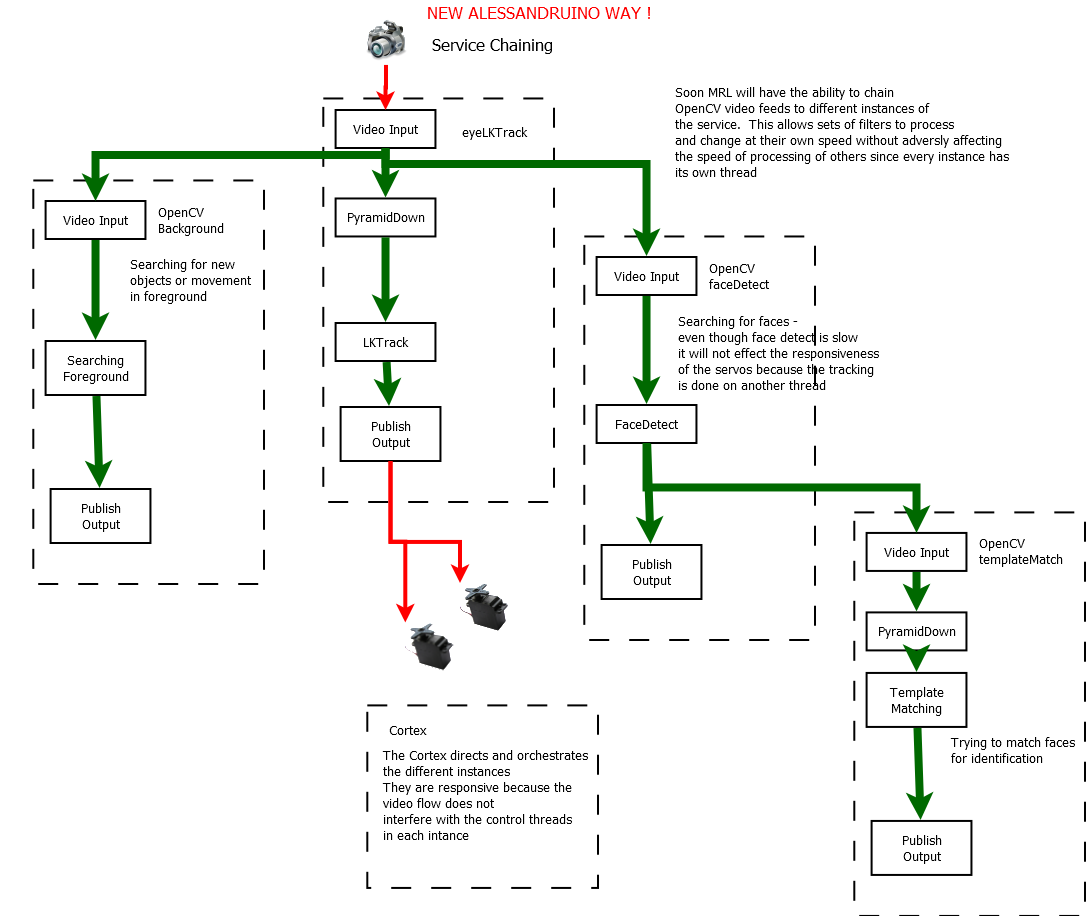
Here is a first attempt to do what the diagram shows.
Things of interest :
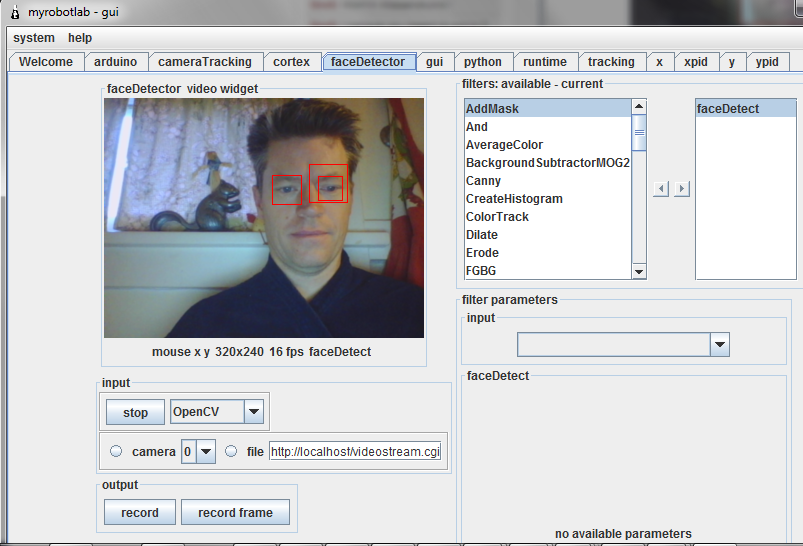
trying a different Haar classifier .. there seems to be serval pre-made ones face, eye, full body, profile, mcs eye pair, upper-body, lower-body... Makes me wonder about creating new classifiers...
.png)
This service uses java.awt.Robot to provide a video stream of your screen, and to allow access to programmatically clicking the mouse and pressing keys.
Testing harmonic motion applied to a servo:
The harmonic motion is a type of periodic motion.
For example, the projection of a point moving around a circle on the diameter of the same circle is an example of harmonic motion.
.png)