Services
This tutorial is based on an older version of My Robot Lab (1695) and not the current bleeding edge. You can have more than one version MRL installed/unzipped on your computer.
 Inmoov
Inmoov
This tutorial is based on an older version of My Robot Lab (1695) and not the current bleeding edge. You can have more than one version MRL installed/unzipped on your computer.
Inmoov
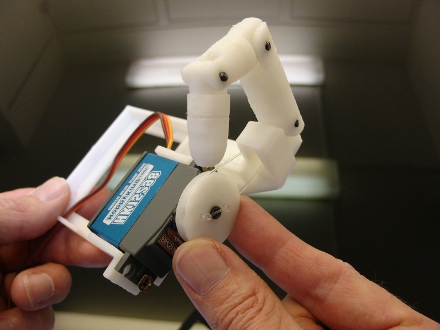
1 X Arduino board
1 X servo MG946R or HK15298 or MG995
.jpg)
Help
Hello ,
please , I cant understand how it's will work while there is just ardunio code in the arduino board , I want to try it but maybe my mators will burn cuz the code is different from the code that in the inmoov.fr tutorial for finger
please explain to me
Hi Dania, every release of
Hi Dania,
every release of myrobotlab comes with 2 parts :
a myrobotlab.jar and a matching mrlcomm.ino
These are built and tested together, and meant to be used together. In fact if you try to use different versions of jar & ino it usually complains with a warning "VERSIONS DO NOT MATCH !"
I would recommend using the latest release https://github.com/MyRobotLab/myrobotlab/releases
download the jar - run it and install the services (as it says on the release page)
The the matching MrlComm.ino which you want to load on the arduino will be located :
{directory where you downloaded the jar}/resources/Arduino/MrlComm
If you get to this point in theory you can control the finger by voice and many other features.
If your concerned your motor will get burnt always have a hand on the power supply cord - and pull it if your servo gets too hot.
Good Luck.