.png)
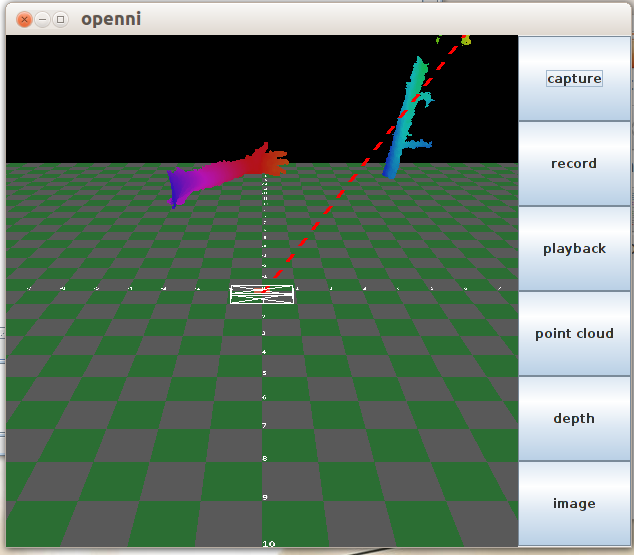
Update : Radom Mapper ! - it works !
The cause and effect :
Arduino wire changes state (Bumper) ------ sends an event to Python ---------> Makes a random wall !
Update : Radom Mapper ! - it works !
The cause and effect :
Arduino wire changes state (Bumper) ------ sends an event to Python ---------> Makes a random wall !
The best way to get involved, stay current and even push MyRobotLab development is to uh. . .get a little bloody. Figuratively that is.
Most people (me included) tend to look for "stable" software releases. It's "done." Won't be changing for a while. Things probably work best and will keep working.
Uh. . .with MyRobotLab, the only one of those that you can really depend on is "Won't be changing for a while."
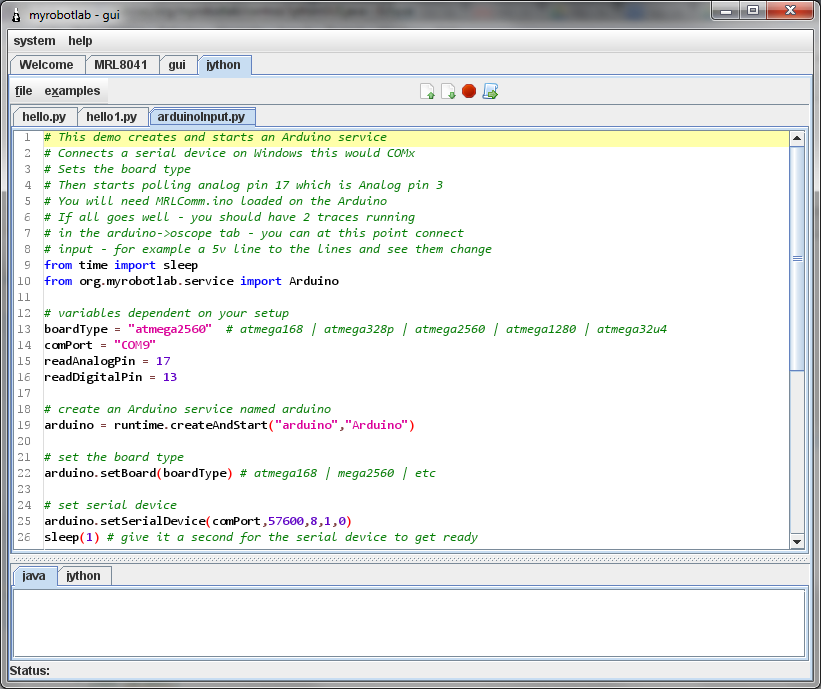
Something I've wanted for a while is multi-paged Jython editor ... Viola ... (it's still in development - but getting closed to being checked in)
Now you can have an initialization script in one file, and a State machine in another :)
We can copy paste, from one file to another..
But wait .. There's MORE !
Houston is a robot service based on DancesWithRobot's (DWR) Houston project. Houston is on the bleeding edge of development.
Houston consists of the following sub services :
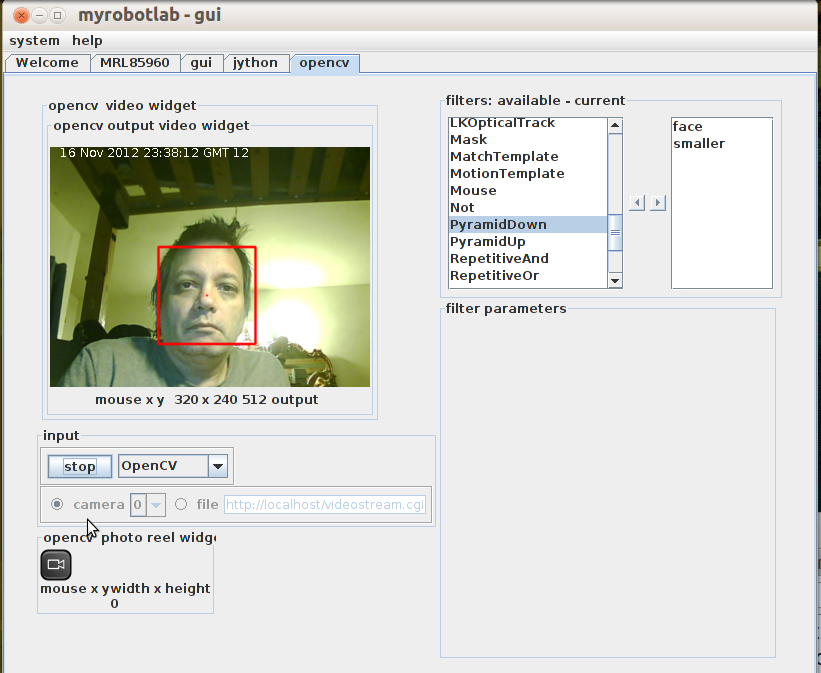
The thing that I really REALLY like about MyRobotLab, is that GroG has taken really difficult things like speech recognition and vision processing and made it "monkey pushes the button" easy.
Pioneers are the guys with the arrows in their backs. GroG can probably tell you all about that.
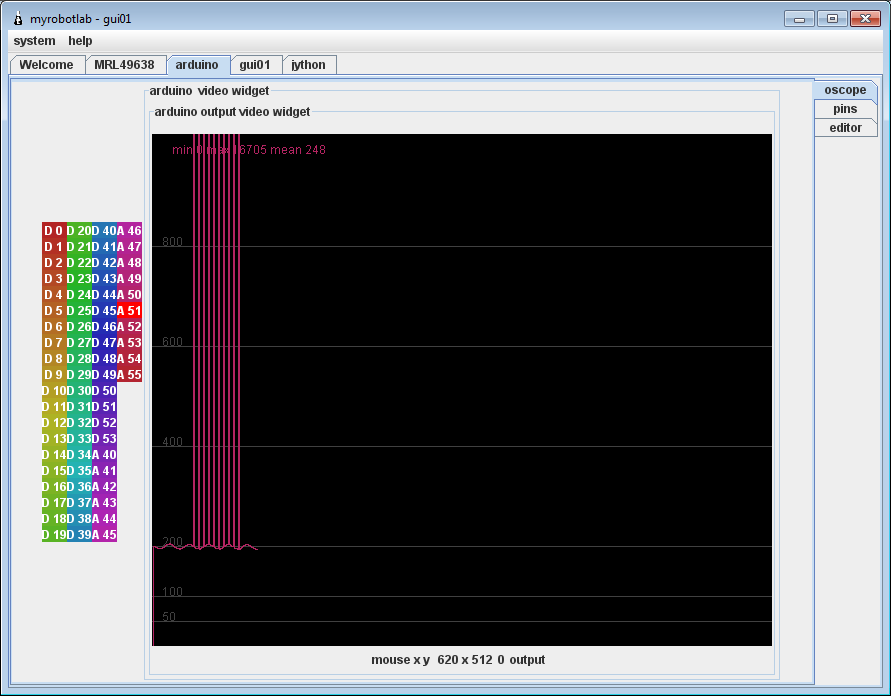
Here I'll go over several issues I have found with the Arduino service & WIndows 7 (64 bit)
FTDI Driver strangeness & Jumpy Oscope
After updating my driver at some point (or unknowingly being updated by Windows) I noticed the Arduino Oscope behaving very strangly. When I selected a trace on the Arduino to display, the trace line would freeze, then flash quick, then pause, then flash - nothing like the smooth behavior it had previosly.
Hey,
I have x64 bit OS running on one of the builds you have on the bleeding edge.
I am not sure if my setup is fully functional.... but I get it to work most often and sometimes have to kill the java process manually to get it to release the serial port....
I'm having fun with this and learning a little more each day.
My question is how can I talk to the Arduino with a direct serial connection via realterm or equivalent terminal when running the arduinoserialbare.pde on the microcontroller.