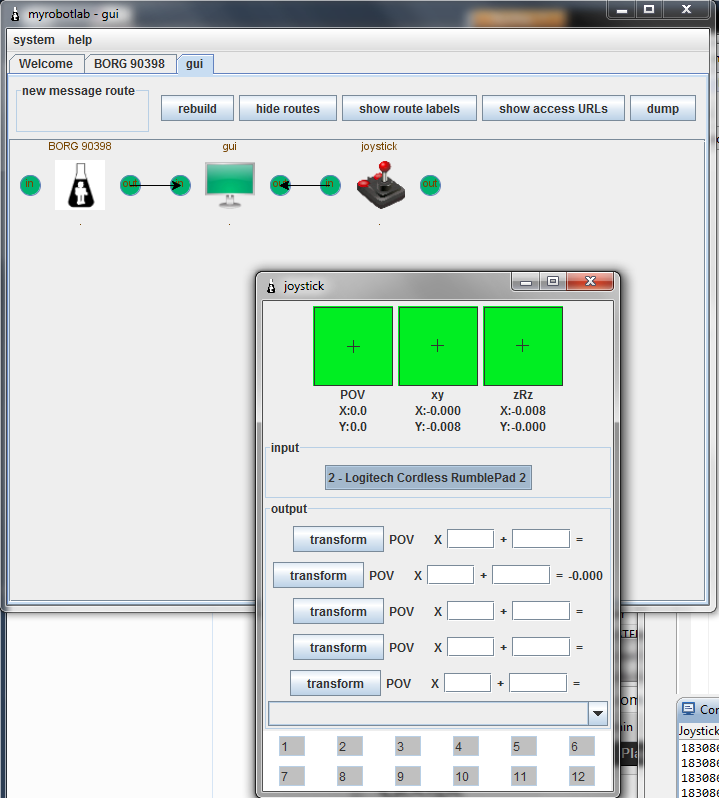
This service allows input from usb joysticks or gamepads. You can attach to a joystick and examine axis or button data. These button and joystick events can be sent to other services, such as servos or motor services. It could be used for a "manual" override to take control of a robot.
.png)