Hmm probably should put sparkles in it. Anyway this is the new NeoPixel2 interface so far.
.png)
Each pixel comes with its own color chooser, then there is a fill and select color chooser, and an controller, pin, pixel count and animation drop down.
Hmm probably should put sparkles in it. Anyway this is the new NeoPixel2 interface so far.
Each pixel comes with its own color chooser, then there is a fill and select color chooser, and an controller, pin, pixel count and animation drop down.
Jim_K asked about how to start Nixie's InMoov2 simulator... so here it is:
InMoov2 version 1.1.518
Win-10
java version "1.8.0_202"
Java(TM) SE Runtime Environment (build 1.8.0_202-b08)
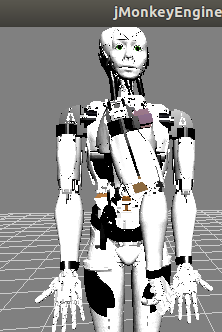
Heh, working with JMonkeyEngine service saving and loading configuration ...
Making progress, but as you can tell ... still needs work :)
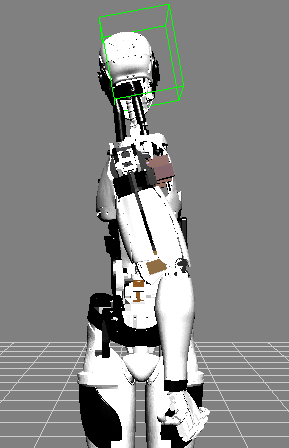
I think it makes a difference the order for which you apply local transforms .... :)
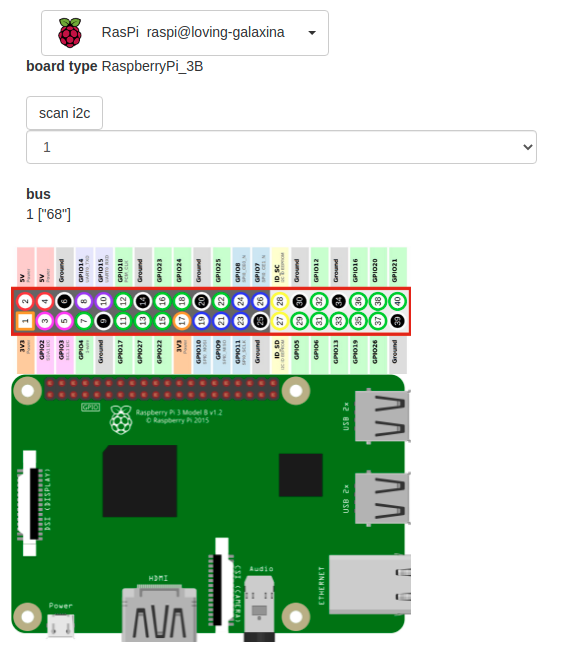
RasPi service now has i2c bus scanning ability ...
The MPU 6050 web ui was done originally by Mats ...
Yay Mats ! - always does great work. But, unfortunately the original THREE teapot geometry is gone :( which made the UI render blank.
So I made it use a box geometry - simple, but worky at least again !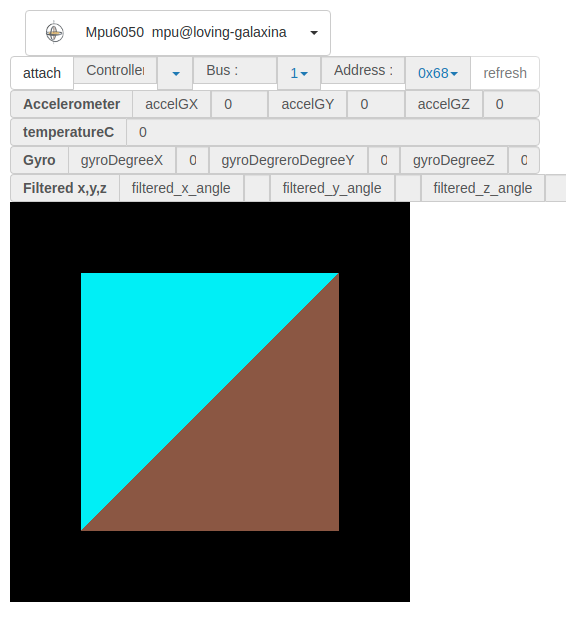
Hi Guys. I tri to build Robots again but first i need MRL to work for play and test. So please tel me what do i do wrong. I have downgraded my Arduino software to get mrl.com loaded on it. I try every thing but When i connect comport to Arduino, my mrl program close and only web page stay open. What do i do wrong.
Please help.
Greetings Adolph
I have added gears and an AS5600 rotary encoder to one of my InMoov shoulders. For shoulder moves I am applying incrementing positions every 20 ms to my shoulder servo. When requesting shoulder positions I record the requested position and the measured position for each of the 20 ms steps.
I would like to use the measured position vs. the requested position to detect a blocking of the shoulder move.