Can you please give me link to nixie. My pc was capture by Randsome virus so i lost everything please
Can you please give me link to nixie. My pc was capture by Randsome virus so i lost everything please
# start the service inversekinematics3d = runtime.start("inversekinematics3d","InverseKinematics3D")
!!org.myrobotlab.service.config.ServiceConfig listeners: null peers: null type: InverseKinematics3D
Hi All,
I have continued to work on the robot legs and have them 'static' walking
All the main support parts are made in aluminum
Still using RoboClaw boards for driving the 10 motors, all motors have encoders
New all joints have angle sensors
I have a IMU on the platform and am using roll and pitch
power is from 3 LION 3.7 volt cells on the top back, cells are from a hybrid car
I finally listened to Ray and have the weight on the top, inverted pendulum
Hello everyone! How do I add new Python libraries to myrobotlab. So that my Python 3.7.7 scripts can work?
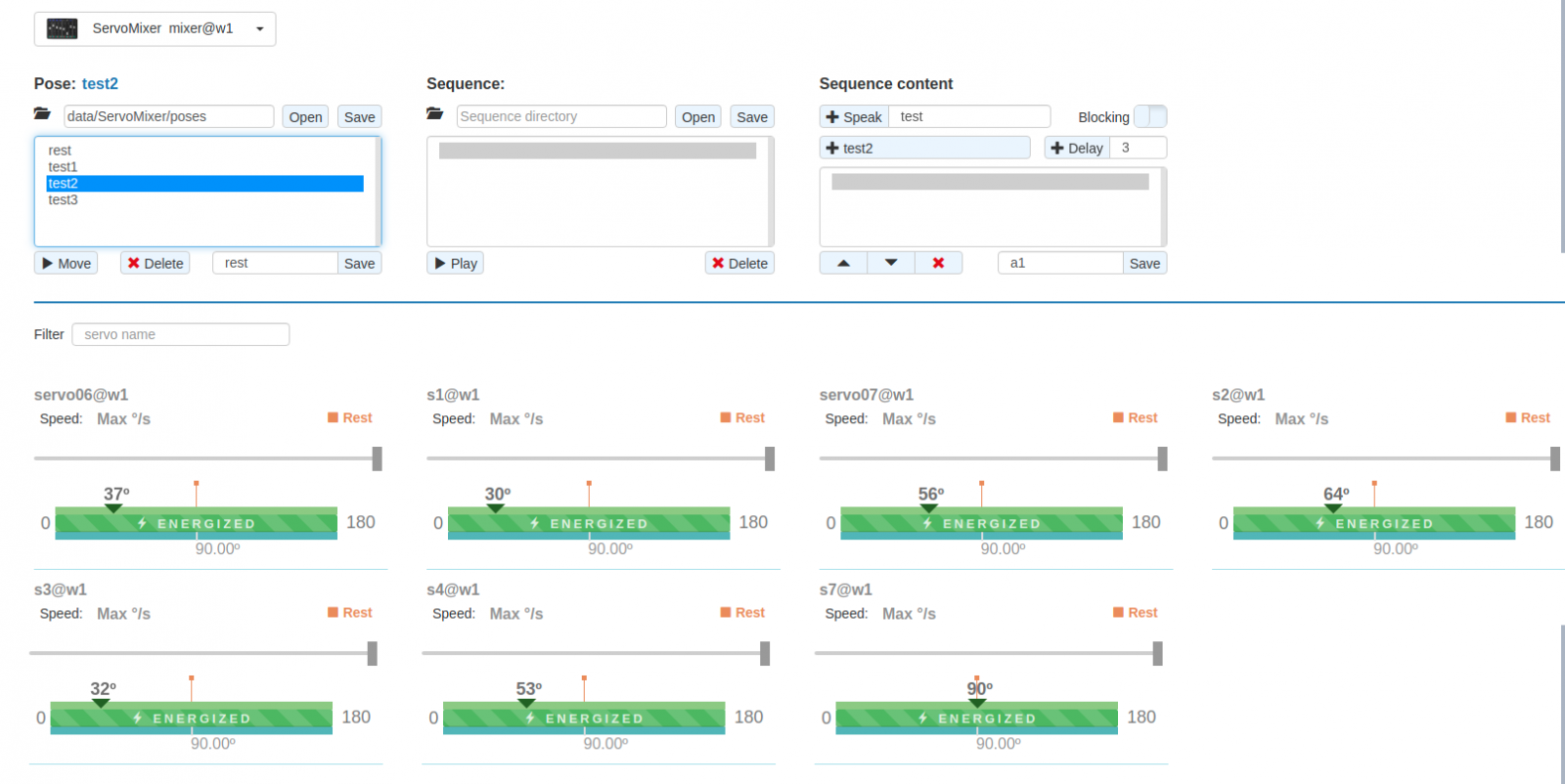
# TODO: Implement this script fpr servomixer = runtime.start("servomixer","ServoMixer")...
!!org.myrobotlab.service.config.ServiceConfig listeners: null peers: null type: ServoMixer
General purpose service to orchestrate servos.
######################################### # Random.py # description: Random message generator - sends messages # at random intervales with random parameters # categories: general # more info @: http://myrobotlab.org/service/Random ######################################### # start the service python = runtime.start("python", "Python") random = runtime.start("random", "Random") clock = runtime.start("clock", "Clock") def happy(): print("i am happy") def sad(): print("i am sad") def angry(): print("i am angry") # add a named random task random.addRandom("random emotion", 1000, 2000, "python", "exec", "happy()", "sad()", "angry()") # enable random events random.enable() def roll_dice(value): print("roll_dice " + str(value)) # roll the dice every 1 to 2 seonds random.addRandom(1000, 2000, "python", "roll_dice", random.intRange(1, 6)) # add a complex dice def roll_complex_dice(value): print("roll_complex_dice " + str(value)) # roll the complex dice every 1 to 2 seonds random.addRandom(1000, 2000, "python", "roll_complex_dice", random.doubleRange(1, 6)) def random_color(value): print("random_color " + str(value)) # roll the dice every 1 to 2 seonds random.addRandom(1000, 2000, "python", "random_color", random.setRange("red", "green", "blue", "yellow")) # do a complex multi parameter, multi-type method def kitchen_sink(dice, complex_dice, colors, names): print("kitchen_sink ", dice, complex_dice, colors, names) random.addRandom(1000, 2000, "python", "kitchen_sink", random.intRange(1, 6), random.doubleRange(1, 6), random.setRange("red","green","blue","yellow"), random.setRange("bob","jane","fred","mary")) # set the interval on a clock between 1000 and 8000 # if you look in the UI you can see the clock interval changing random.addRandom(200, 500, "clock", "setInterval", random.intRange(1000, 8000)) # Chaos monkey clock starting and stopping ! random.addRandom(200, 500, "clock", "startClock") random.addRandom(200, 500, "clock", "stopClock") # disable single random event generator - must be explicit with name.method key random.disable("python.roll_dice") # you know longer should see the python.roll_dice event firing - since it was explicitly disabled # stop events - but leave all random event data # allows re-enabling # random.disable() # enable events # random.enable() # stop events and clear all random event ata # random.purge()
The Random service can create random messages with random parameters. Any method accessable can be called at some interval with ranges of parameters. For example, if you wanted a Servo to move at some interval between 1 and 5 seconds between 35 and 165.
random = Runtime.start('random','Random')
random.addRandom(1000, 5000, 'servo01', 'moveTo', random.intRange(35, 165))
Example of Web UI list of current random method events
######################################### # Mpr121.py # description: MPR121 Touch sensor & LED Driver # categories: shield, sensor, i2c # more info @: http://myrobotlab.org/service/Mpr121 ######################################### # start the service mpr121 = runtime.start('mpr121','Mpr121')
!!org.myrobotlab.service.config.Mpr121Config address: '0x5A' bus: '1' controller: null listeners: null peers: null rateHz: 1.0 type: Mpr121
The Mpr121 service
Hello, enybody can explain me how the signals from MRL serial to Arduino is coded?
I am trying to decode but have no idea what method is used to code serial messages going to arduino.
Example from serial readings that:
################################################################# # Example Code # ################################################################# ################################################################# # First start your I2C Bus Master Device # ################################################################# # If your using the Arduino Nano, comment out this line and # uncomment the ArDuino Nano lines raspi = runtime.start("raspi","RasPi") ################################################################# # Start the Arduino Nano connected using /dev/ttyUSB0 # ################################################################# #arduinoNano = runtime.start("arduinoNano","Arduino") #arduinoNano.setBoardNano() #arduinoNano.connect("/dev/ttyUSB0") ################################################################# # Next start the PCF8574 service # ################################################################# pcf = runtime.start("pcf","Pcf8574") # Then attach it to the I2C Bus Master # When attaching, we specify the Bus Master Device, # the I2C Bus Number # and the I2C address pcf.setBus("1") pcf.setAddress("0x27") pcf.attach(raspi) #pcf.attach(arduinoNano,"0","0x27") ################################################################# # Next start the Hd44780 service # ################################################################# lcd = runtime.start("lcd","Hd44780") # Once the service has been started, we need to attach it to # the PCF service lcd.attach(pcf) # this will initalise the display. # not needed now unless you want to manually reset # lcd.reset() # when we want to clear the screen call this lcd.clear() # You can turn the backlight on or off. # True will turn it on, False will turn it off. lcd.setBackLight(True) # Filally to send text to the display lcd.display("Hello World", 0)
!!org.myrobotlab.service.config.Hd44780Config backlight: true controller: null delay: null listeners: null peers: null type: Hd44780
.png)
.png)