
Next version 'Nixie' is coming soon !
Help us to get ready with MyRobotLab version Nixie: try it !

I just bumped into this http://unity3d.com/unity
Together with this http://code.google.com/p/unity-arduino-serial-connection/downloads/list
It is basically a 3D Game engine / design tool for 3D graphics.....
.... with the added extra of connecting a Arduino comm port .

It was quite a work to "Rigg" the file that Gael sent me.... Its feasible, and the speed is good.
So far I have only automated the fingers , arm, and shoulder joint.
...and now that I can understand the mechanisms .... next job is to add some bones to make pose_ing easier (in the blender environment).
The Potentiometers work well and now I will search a Potentiometer bank to help develop further.
.png)
.png)
View from laptop .. yep.. On the exact same source as the "desktop" MRL ! 1 source to control them all !
Next is getting an Android service which is capable of getting data from every sensor a phone might have, and interfacing with every system level resource (such as voice) that a Android smartphone might have ..
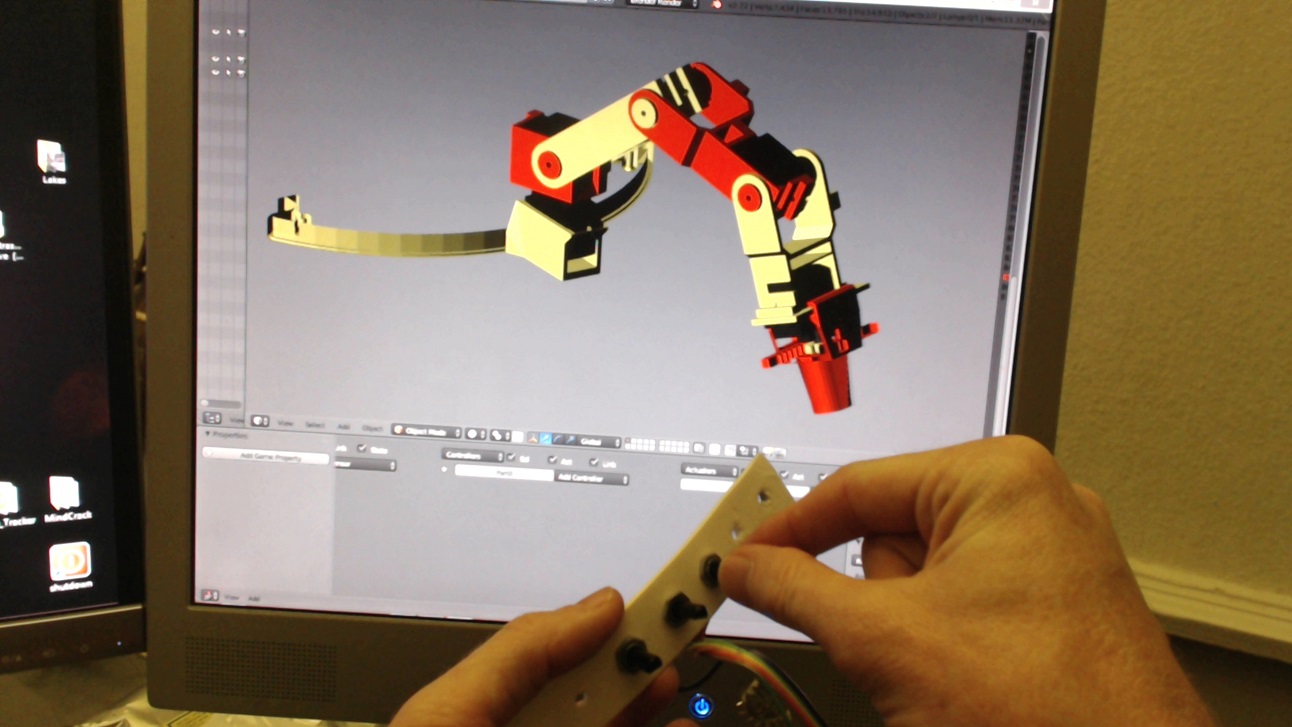
Have Just configured 4 Potentiometers to control my Blender Virtual Robot Arm.. Using a Propeller to TX four Analogs over a Serial link. Using Python code to control the actuators.
Each arm part is parented to next in the chain , meaning that they are all connected as one limb however able to turn on its parents axis.
This is really a page to talk about how to measure the actual angle that a servo has reached, rather than the last position the servo was told to move to. The aim is to be able to allow the servos to automatically configure their actual max/min angles. In addition, it should allow for quicker response to the stop() method.
The stop() method stops the sweeper that is currently running for the servo. However, this only tells it to stop the sweeper, the servo will continue to move to the last position it was told to go to.
Hello GroG,
All good ?
It's done, Eclipse is well installed, and all is ok, i can compile MRL without problem.
can you explain me the next step to create my own service please.
And i've also an other question . I'm trying to make to activate the leds of my robot mouth move while it's speaking.
I decided this weekend to make a pc board for the DC-DC voltage regulator circuit. I have not used the pc board machine for a couple of years. It can only do single sided or 2 sided boards. I designed the circuit and board in “Eagle Software”. That software puts out a file, Gerber format, that the machine takes in and cuts. Decided to go with Kevin’s advice and put 4 LM338’s on it. So it should be able to handle 20 amps. Trying to brush Azul’s hair I had the 2 channel DC-DC circuit (now in Azul) drop down to 3.3 volts and fail.
After having a fatal "twist" of my wrist I decided to try to incorporate springs into the return tendons.
The twist of the wrist breaking six tendons and folding the forearm near a print flaw I saw that the wrist though realistic was too realistic for the unstrechable line we are using. Now I haven't fixed this yet but I did make it so your fingers may be less floppy and an easier time trying to tension the tendons in the hand.
Now my springs that I bought are a little weak, but this mistake turned into a great find.
Here's a simple example of how to use OpenSCAD to edit a pre-existing STL file. This is useful if you want to add or subtract areas to the existing file.
OpenSCAD is an open source CAD program that allows users to programmatically build up models using basic geometries. The below example is based off of the part
Download OpenSCAD from http://www.openscad.org/ (It's free)
Download the STL file that you want to edit. For this example I used http://www.thingiverse.com/download:89523