Here is a vidéo of "Sweety" . Sorry for the bad quality of the video, there wasn't enough light, and i had to
up the brightness of the video ...
Here is a vidéo of "Sweety" . Sorry for the bad quality of the video, there wasn't enough light, and i had to
up the brightness of the video ...

Backpack, made with acrylic and labmade vacuum forming machine


Finally the goal was scored!
Was missing the speed & pause to learn (save).
Now the speed and pause can also be saved. The learn-tag uses the oob-tag which goes thru multiple conditions and the final command is a "block" which contains set.speed()+move.servo()+pause(). Setting speed and pause is optional.

hi
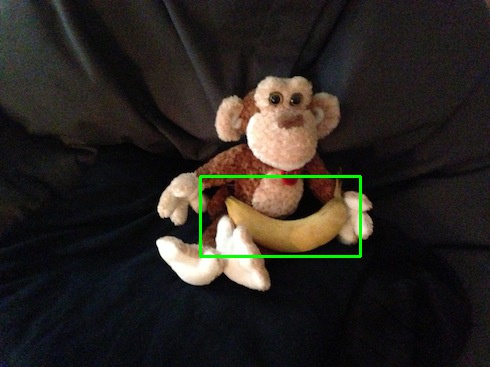
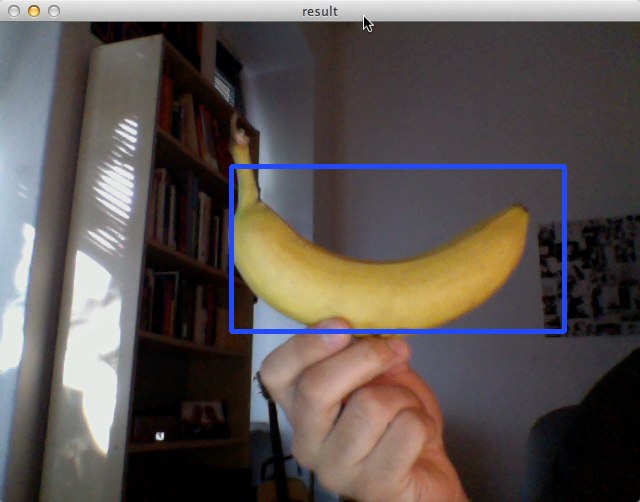
thanks greg for ur help we have done some testing using open cv in native python
can u sugguest some filter examples to remove granual noise
some problems we have noted:
1)problems in detecting very dark colour cars
2)unable to maintain a threshold due change in sun direction
As an experiment I have attached a Laser to InMoov's Left eye & Wii-Camera to its Right eye.

What InMoov sees is the reflected Laser light (depicted as the white dot on the green bar)