This simple html page works to chat with rasa bot server on localhost....
This simple html page works to chat with rasa bot server on localhost....
Starting to shape this.
If someone has criticism, suggestions, ideas. Things that should and should not be.
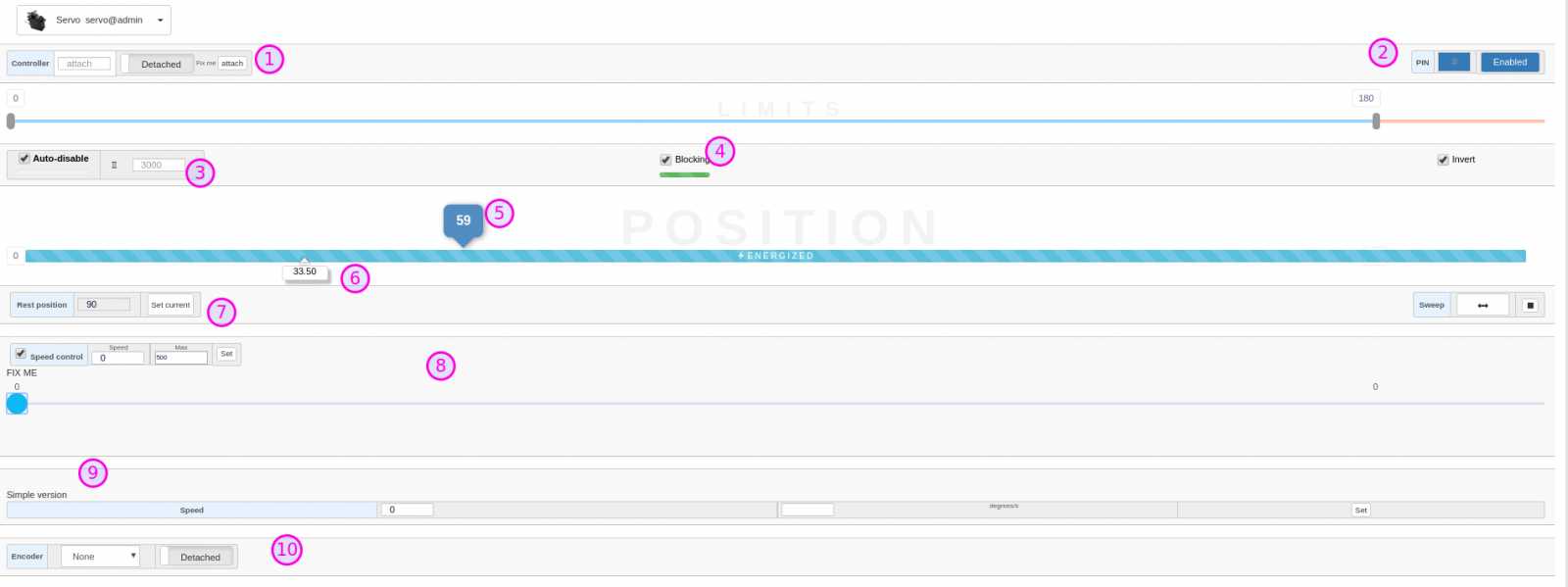
What does the "display" button do?
[Record] (x) frames [Record frames] is somewhat confusing.
Came across this about a year ago, the creator is a nice young fella. Thought maybe it would be of interest to someone here that may want to tinker with it for possible use in MRL, or for ideas. Its java, there is an APK for android as well.... and I see recently he has been working on it as a discord bot.
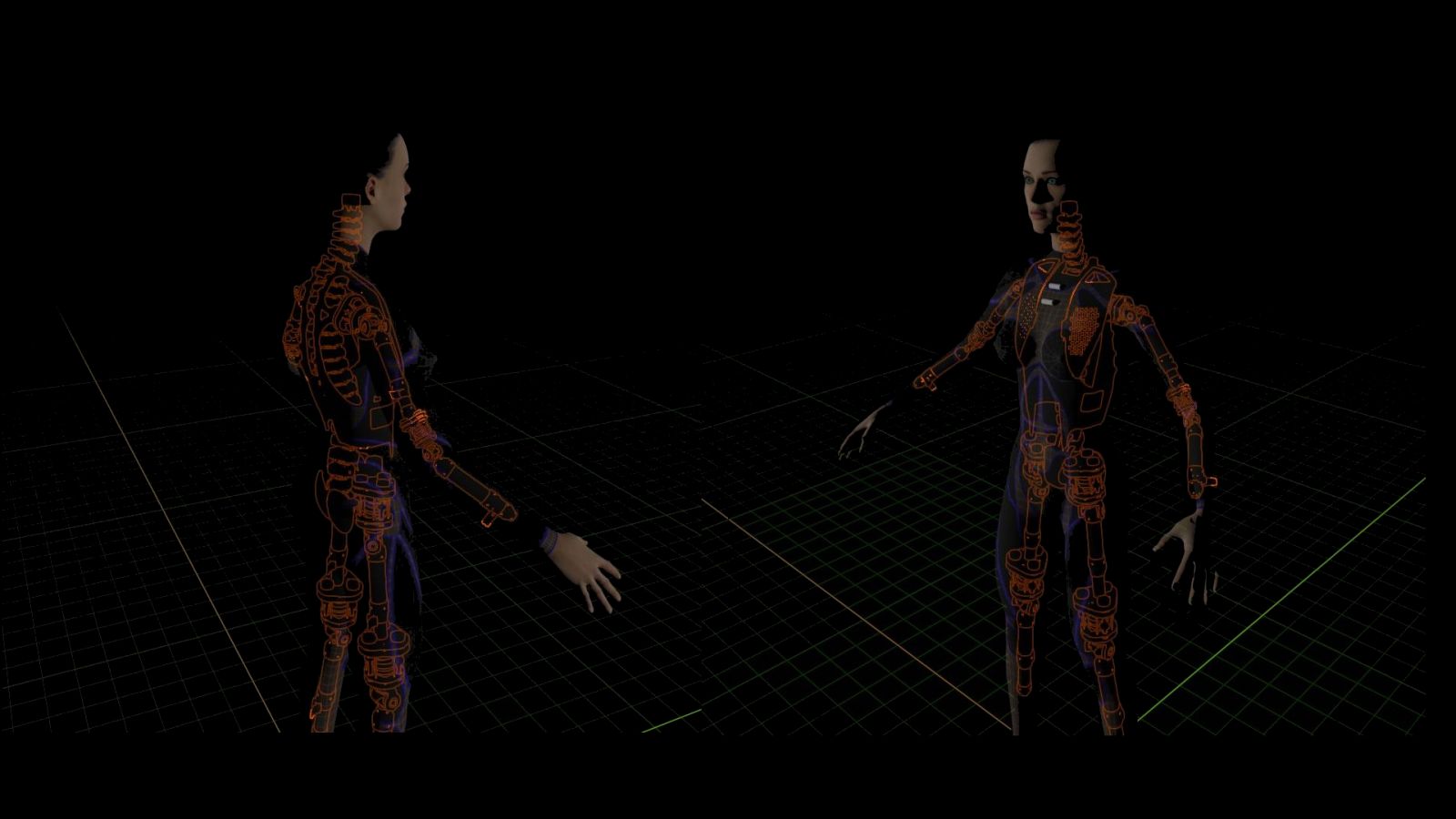
This is a quick concept render of Lola the robot i'm working on. The goal is creating a robot whose appearance can be easily changed. Such as length of arms, kneck, legs, torso, and skin characteristics.... etc.
This used to work now the ai keeps picking itself up and it gets in conversation with itself and won't let me answer
I even tried to use the lloyd one from pyrobotlab and just changed to maryspeech and it still does the samething
I came across this on GrabCAD and thought it may be something good to share here to help promote some joint ideas. I have uploaded it to a workbench on my GrabCAD account as well and am in the process of tinkering around with it, as well as printing off on a 3D printer to play with.
https://grabcad.com/library/mechanical-omnidirectional-joint-1

Hi
Been doing lots of tweaking while stuck at home but I figured this one might be worth sharing
I found that CALL ME * voice command would change the name in the existing profile before switching to the new/different one. I did lots of searching and did not find a similar commmand(Icould have missed it there is a lot to go through)
I didn't really want to edit the existing file as the aiml directory makes it easy to add your own. So I wrote this and put it in a file called switchuser.aiml
We been busy.
Latest on webgui_work branch
Hi Astro,
Yes ! .. I see your updates by doing a get pull. I took a screen shot and linked it to a full size image.
(stashing is one way to handle conflicts where more than one person makes modifications on the same file)
There is more to learn on that, but I am glad you made a backup of your work.
It's crazy, but when I took AI at SUNY UB years and years ago, some techniques for loading a KB remain pretty much the same. 35 years ago, I used Prolog to load up PC-IQs vocabulary when NLP was a dream and Eliza was the best, yet only syntactically clever. What I am doing now, it eeirly similar. So here is a shot for those that used Lisp or Prolog... This representation replaces the AIML that I once used, and the random phrases that I currently use in my plethora of real world modeled java objects. I first used positioning, but today decided th