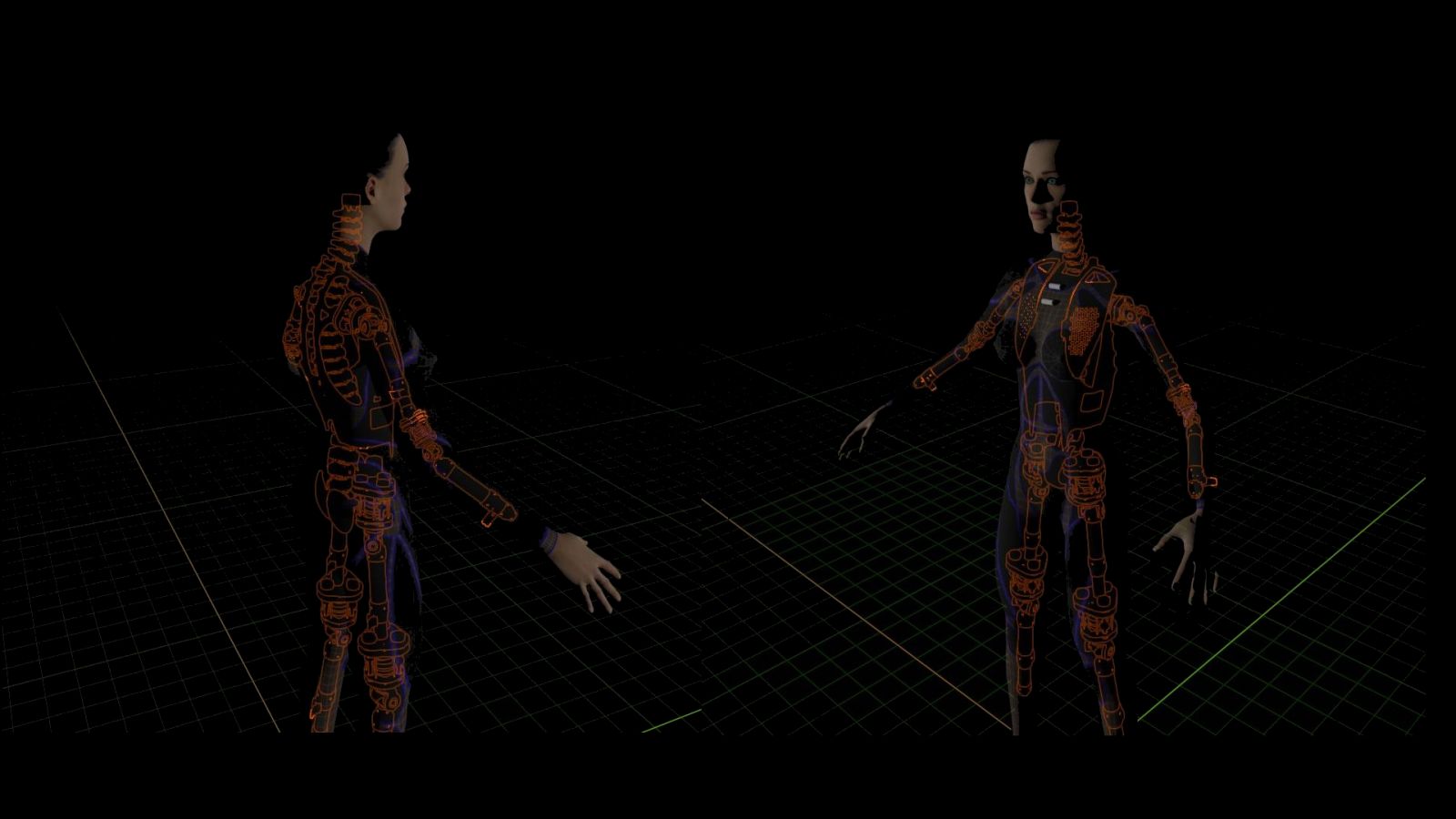
This is a quick concept render of Lola the robot i'm working on. The goal is creating a robot whose appearance can be easily changed. Such as length of arms, kneck, legs, torso, and skin characteristics.... etc.
After trying a number of ideas for skin, I have decided to go with an interesting combination of things to achieve softness where softness is needed and firmness where firmness is needed, and be able to keep the weight down.
If all keeps going well, it will be able to mimic most human movements.
I will be sharing all the files and such. This is for everyone to have fun with. My InMoov got a little lonely, wanted a girlfriend. :)
Will update this blog as I move along.