Here is an example of what I'm trying to fix ..
Here is an example of what I'm trying to fix ..
Hi Folks
I have a standard hc-sr04 sensor, actually I have 2, but looking in Nixie, ultrasonic.py in services, I don't see a way of actually activating 2 individual sensors.
what is the correct way of testing this sensor to make sure it works?
In the ultrasonic.py there is a print statement: print "ultrasonicSensor test is ", i01.getUltrasonicSensorDistance(), however, I have not found where this is printed.
# TODO: Implement this script fpr servomixer = runtime.start("servomixer","ServoMixer")...
!!org.myrobotlab.service.config.ServiceConfig listeners: null peers: null type: ServoMixer
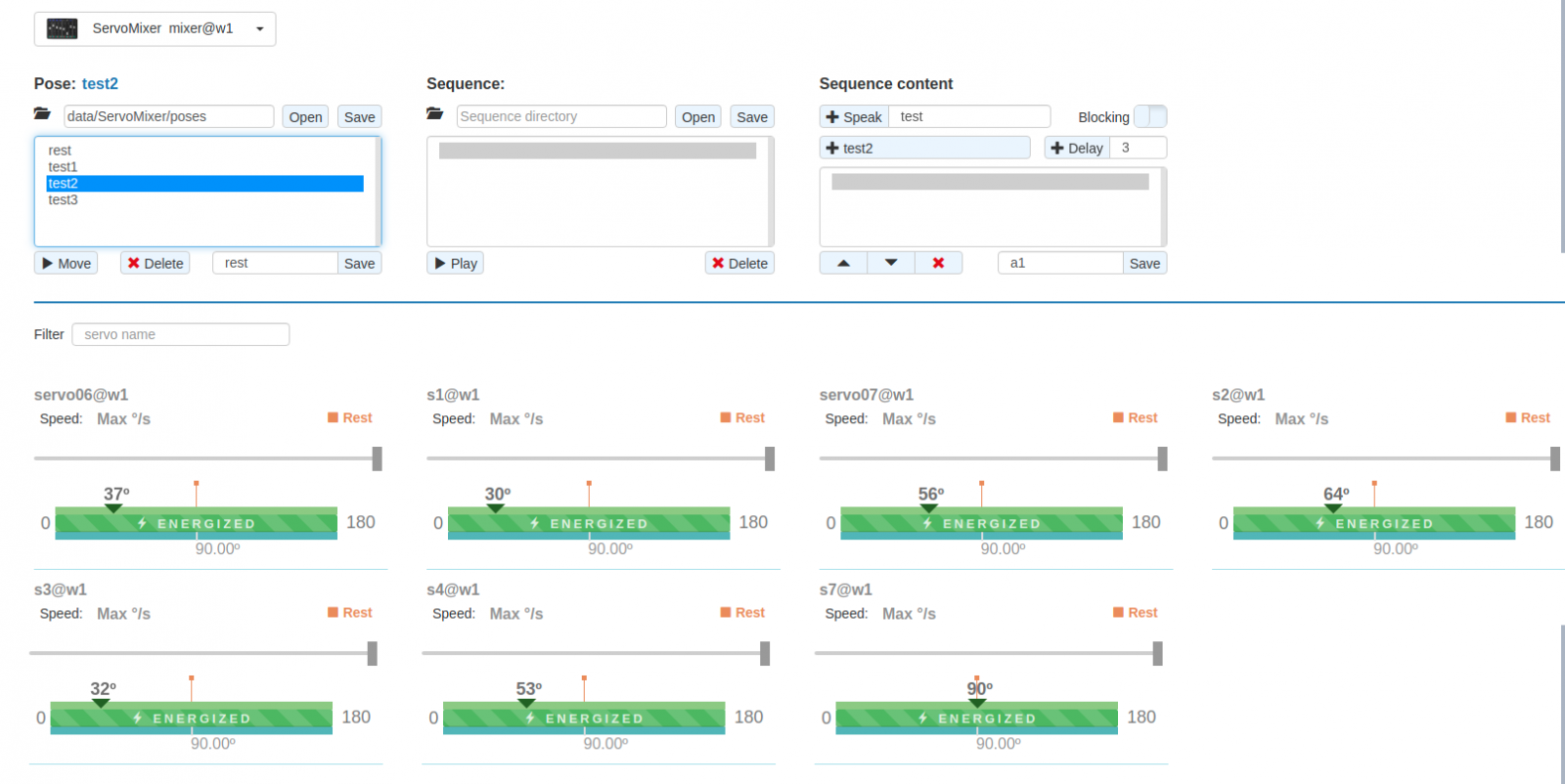
User interface is worky in this pr - https://github.com/MyRobotLab/myrobotlab/pull/801
"sub panels" how to get service page parts showing in other service pages is worky, as you might be able to tell by the set of servos here.
reloaded a clean/new version of win10 64 bit
downloaded Java: java version "1.8.0_28", Java HotSpot(TM) 64-Bit Server VM (build 25.281-b09, mixed mode)
downloaded Manticore: manticore 1.0.2693
create MRL directory and run java -jar myrobotlab.jar -install
Have worky (N) Mqtt Instances....png)
It may look like duplicates, but its not. There are 4 MRL Instances connected together, and all (so far) appear to be fully functional in the webgui.
There are 3 which have mqtt connectivity, and another that is connected through the webgui service.
WOOHOO ! - will continue looking for bugs and doing more refactoring ...
She has a lot of work to do on her routine but I have more work to do on my sub-routines!
https://drive.google.com/file/d/12d0ImvtG1tZ9ygUCp3aGUTZROVVeS7aj/view?usp=sharing
I have MRL running with InMoov and I have just added a PIR sensor for wakeup. It appears to be working correctly but it takes 5 minutes for MRL to put InMoov to sleep. I would like to shorten that time and have the script reset the timer everytime the PIR detects heat. I tried adding the section [TWEAK] with the HumanPresenceTImeout= . But no matter what value I set it still takes 5 minutes before it enters sleep mode.
Any suggestions how I can adjust this timeout?
Thank you.