Hello everyone I NEED HELP I'm Fabian from Argentina, I am new to robotics but I am very interested in learning to use all the services and advantages of this wonderful program. My problem is I want use to Tracking Myrobotlab faces, I have the servos, Arduino, and when I run the code in python I get the following error
tracker.initTracking();
tracker.initControl();
tracker.initInput();
tracker.trackLKPoint();
102033 [Thread-9] ERROR org.myrobotlab.logging.Logging - ------
SyntaxError: ("mismatched input '' expecting EOF", ('<string>', 2, 1, ' tracker.setRestPosition(90, 90);\n'))
at org.python.core.ParserFacade.fixParseError(ParserFacade.java:92)
at org.python.core.ParserFacade.parse(ParserFacade.java:201)
at org.python.core.Py.compile_flags(Py.java:1737)
at org.python.util.PythonInterpreter.exec(PythonInterpreter.java:206)
at org.myrobotlab.service.Python$PIThread.run(Unknown Source)
------
102033 [Thread-9] ERROR class org.myrobotlab.framework.Service - Python error
THE CODE THAT I USE IN PYTHON IS THE FOLLOWING
tracker = Runtime.createAndStart("tracker","Tracking")
tracker.setRestPosition(90, 90);
tracker.setSerialPort("COM3");
tracker.setXServoPin(3);
tracker.setYServoPin(11);
tracker.setCameraIndex(1);
tracker.initTracking();
tracker.initControl();
tracker.initInput();
tracker.trackLKPoint();
Hello and
Hello and welcome fabianfabiani !
Python is very strict about indention. This is how far each line is indented to the right
It looks like you have the first line " tracker = Runtime.createAndStart("tracker","Tracking"):"
starting further to the right than all the other lines...
Python is not happy with this :)
Other error
Hello again Grog, Wonderful now loaded the code in Python and eyelashes appeared to face tracking but even I still get the error NEXT JAVA tab:
28557410 [tracker] ERROR org.myrobotlab.framework.Service class - but unknown data recieved state opencv
I can see my face tracking in opencv tab to filter facedetec I have the webcam with servos for movement in x, y, connected to arduino in 3 to 11 pins will also load the file MRLcomm.ino in arduino but the servos still do not move. I really want to run this. I hope I have a little patience and thank you very much for your help
Hi... If you Are trying to do
Hi... If you Are trying to do face tracking you have to add another row to' your code without using the filter tab (this method add automagically the face filter for you) : tracker.faceDetect()
If it doesn t work try this NEW FRESH BETTER STRONGER SCRIPT:
Tracking.minimal.py in this page:
http://myrobotlab.org/service/Tracking
Let us know!!
I will insist and try over and over again with your help
Hello again, I was proven last week and it worked the Tracking.minimal.py webcam but follow my face just when I I moved down and to the side but it is difficult also gave me great joy to see that moved the servos. Today loaded # file: Tracking.minimal.py # file: Tracking.manual.py # file: Tracking.eyes.py and Grog code that let the end but none worked and shows me ERROR org.myrobotlab.framework class. Service - Python Error
I'm getting a little frustrated I have proven many times that is not what I'm doing wrong, or what is the problem.
Growing can be painful sometimes
The latest (Tracking.minimal.py) works with the latest script published on http://myrobotlab.org/service/Tracking
Do following :
Hola ¡ ¡ ¡
I followed all the steps but still did not work so you send the NOWORKY LOG. Thanks Grog and hopefully new instructions to follow.
Step 1 was not successful .
Step 1 was not successful . Did you follow the instructions ?
Beeding edge version is 1837 - your no worky version is 1823.20131021.0701
Step 1 was do a bleeding edge update - follow the instructions @ http://myrobotlab.org/content/helpful-myrobotlab-tips-and-tricks-0#bleedingEdge
You can verify the version after restarting by selecting Help->About (you will see your current version)
(No subject)
I realized that when I do
I realized that when I do step 1 to update the version, a window appears that says could not connect and will not let me update MRL.
Hi fabianfabiani, Are you
Hi fabianfabiani,
Are you connected to the internet when you try to do the update?
Thanks for the screen capture, but can you show the window which appears and says could not connect ?
Sorry Grog. in the window
Sorry Grog. in the window says access denied, it says can not connect, when I do the update automatically appear these two windows and not serrated, but MRL if you close and reopen without being able to upgrade. I do everything being connected to the Internet. What I try to do is try to update MRL from another notebook that I have to see if I have the same problem or not.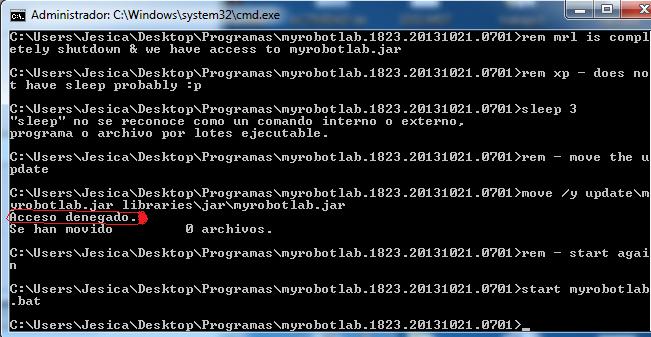
Ahhh - that's helpful
Thanks for the translation - so it can not move the update ... you found the issue.
But why? Could be a couple reasons :
You found the issue, now we have to find out why it can not be moved & updated.
1/2 the way there :)
Excellent now works After
Excellent now works After trying on my other notebook, I finally updated MRL I run the code for tracking objects. With respect to the other notebook I have administrator rights and still do not know why not let me upgrade. Thanks Grog and all people willing to help others, will soon show you the video of my project of a robot head with which I am experiencing while learning some Arduino, I am new to the subject and am motivated by these things , Greetings
\o/
WOOOHOOO !
Great work fabianfabiani ! You persevered !!! Looking forward to seeing your project !