the Blue one is 12v rail switch and the red one is for 6v rail. I have two accus, one 6v12ah and one 12v20ah. 6v is feeding servos, 12v accu is feeding usb hub (through 5v switching adapter, which is also unter the powerboard), which supplies power to webcam and two arduino Megas. 12v rail also powers kinect sensor. I have only one USB cable coming from inMoov to my Ubuntu laptop. I wish not to have any wires at all and there is very good solution to have a wireless serial connection to the robot, using RasPI and www.virtualhere.com, but unfortunatelly it's only for Windows and Mac clients, I want Linux, when that guy make a linux client, I will use that too...
I have to ask, is this part of a University? Why did you build and InMoov, what are you going to do with it ? When did you finish ? What are your plans ?
This robot is done in a University Lab, ideally what I want, to computer science and engineering students to have a basis and they to add software and hardware to it, so to improve it, that will mean to contribute to MRL and InMoov
the Blue one is 12v rail switch and the red one is for 6v rail. I have two accus, one 6v12ah and one 12v20ah. 6v is feeding servos, 12v accu is feeding usb hub (through 5v switching adapter, which is also unter the powerboard), which supplies power to webcam and two arduino Megas. 12v rail also powers kinect sensor. I have only one USB cable coming from inMoov to my laptop.
There is very good solution to have a wireless serial connection to the robot, using RasPI and www.virtualhere.com, but unfortunatelly it's only for Windows and Mac clients, I want Linux, when that guy make a linux client, I will use that too...
MRL had some recent bugs on RasPi due to we are adding more detailed identifiers to the MRL repo. Now that we are in the realm of ARM processors - hard floating point / soft floating point makes a big difference. The versioning of ARM instruction sets must be addressed too.
I think the bug is resolved, but other boards need some work - (e.g. BeagleBoardBlack & MK808)
We managed to get the RasPi to run OpenCV with a WebCam at 6 fps - which is not great - but a vast improvement from 1/30th fps.
Are you interested the RasPi as the main computer for InMoov?



Wow ! Exceptional ! Really
Wow !
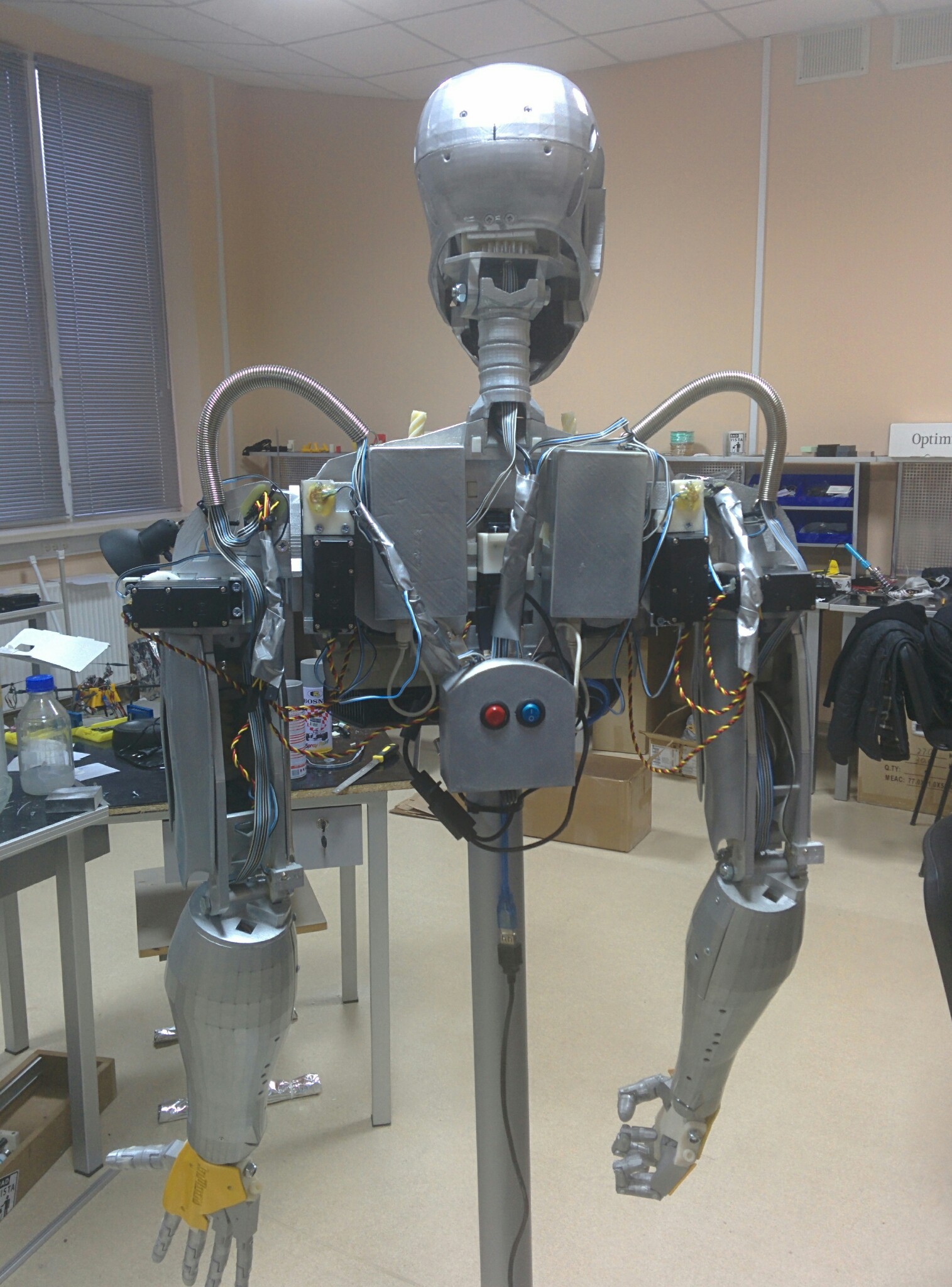
Exceptional ! Really very good build. (even like the Red / Blue Button) Are they for power? Or is one an "Attack" the other "Freeze" :)
Buttons
the Blue one is 12v rail switch and the red one is for 6v rail. I have two accus, one 6v12ah and one 12v20ah. 6v is feeding servos, 12v accu is feeding usb hub (through 5v switching adapter, which is also unter the powerboard), which supplies power to webcam and two arduino Megas. 12v rail also powers kinect sensor. I have only one USB cable coming from inMoov to my Ubuntu laptop. I wish not to have any wires at all and there is very good solution to have a wireless serial connection to the robot, using RasPI and www.virtualhere.com, but unfortunatelly it's only for Windows and Mac clients, I want Linux, when that guy make a linux client, I will use that too...
BTW how are thing towards using MRL on RasPI?
Thanks for all the pictures..
Thanks for all the pictures.. they look great.
I have to ask, is this part of a University? Why did you build and InMoov, what are you going to do with it ? When did you finish ? What are your plans ?
Let us know all the details !!
University
This robot is done in a University Lab, ideally what I want, to computer science and engineering students to have a basis and they to add software and hardware to it, so to improve it, that will mean to contribute to MRL and InMoov
Fantastic !
Fantastic !
Buttons
the Blue one is 12v rail switch and the red one is for 6v rail. I have two accus, one 6v12ah and one 12v20ah. 6v is feeding servos, 12v accu is feeding usb hub (through 5v switching adapter, which is also unter the powerboard), which supplies power to webcam and two arduino Megas. 12v rail also powers kinect sensor. I have only one USB cable coming from inMoov to my laptop.
There is very good solution to have a wireless serial connection to the robot, using RasPI and www.virtualhere.com, but unfortunatelly it's only for Windows and Mac clients, I want Linux, when that guy make a linux client, I will use that too...
BTW how are thing towards using MRL on RasPI?
Very intersting software ! I
Very intersting software !
I looked around and this might be a suitable Linux equivalent - http://usbip.sourceforge.net/
MRL had some recent bugs on RasPi due to we are adding more detailed identifiers to the MRL repo. Now that we are in the realm of ARM processors - hard floating point / soft floating point makes a big difference. The versioning of ARM instruction sets must be addressed too.
I think the bug is resolved, but other boards need some work - (e.g. BeagleBoardBlack & MK808)
We managed to get the RasPi to run OpenCV with a WebCam at 6 fps - which is not great - but a vast improvement from 1/30th fps.
Are you interested the RasPi as the main computer for InMoov?
raspi as main brain
yes I am, as long as it can handle webcam and kinect, by I think it's too week for everithing. Maybe I will put some Dual Atom MiniITX box with linux.
Thanks for the link, I'll look at that usbip, interesting
I don't think anyone has done
I don't think anyone has done a RasPi + Kinect successfully - this is the closest I've seen and he just did the "tilting" part of kinect - no image - http://www.raspihub.com/go/ea15a223216ecd325587d9fb4a26f6472ae71d078a77…
At 700 Mhz and slow bus speed I don't think its a particularly viable system. DJ & DWR both got 27+ fps through opencv on Odroids -
http://myrobotlab.org/content/kinect-freenect-odroid
http://myrobotlab.org/content/opencv-2461-samples-odroid-x2
http://myrobotlab.org/content/grog-fixes-odroid-ocv-without-even-trying