
I haven't been very active on the MRL website for a while now, but I haven't really left. Lately I've been playing around with an Odroid X2 which is a very capable ARM dev board.
Murrman, a user on the Odroid forums has created an Ubuntu based image for the Odroid X2 that includes ROS, OpenCV, and OpenNI including drivers for the Xtion Pro Live sensor.
A few nights ago, in spite of our best efforts, GroG and I couldn't get OCV to run under MRL, so the project went on a back burner for a while and I switched over to playing with a Raspberry Pi where most of the MRL ARM dev work is going on.
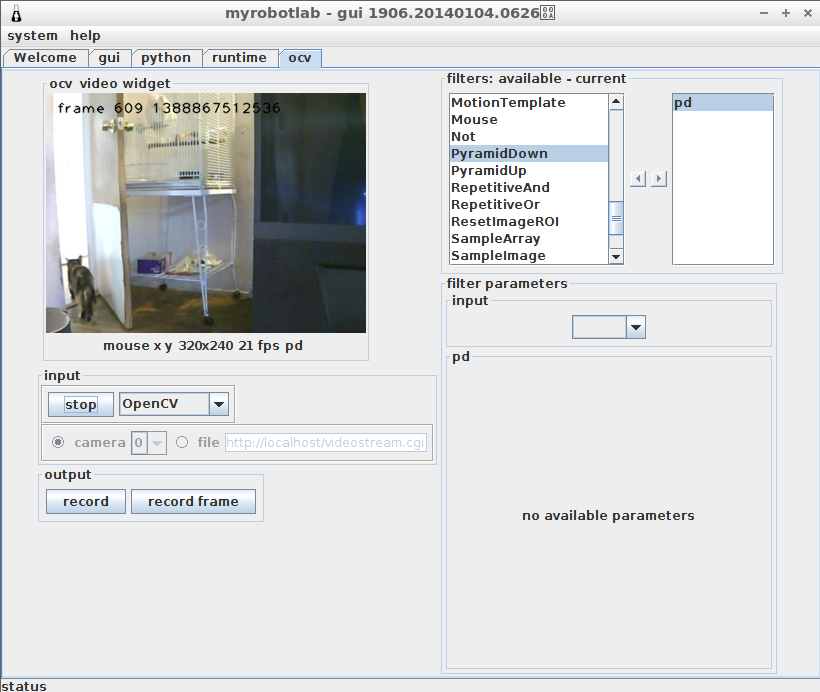
GroG, and his elves have as usual, been busy squeezing more performance out of OCV on Raspberry Pi. (Which most people in the know will tell you is a device that can't really run OCV.) On a whim, I installed the latest version to my Odroid and--wonder upon wonder, OCV worked just fine.
Note the FPS. It was ticking along at 25 fps before and after I ran scrot to capture that picture.
Opening a new instance of OCV with the ever popular pyramid down filter set gives us--pretty much the same performance.
I may have found a bug. At least, when I selected the pyramid down filter as an input, the image disappeared into a black hole.
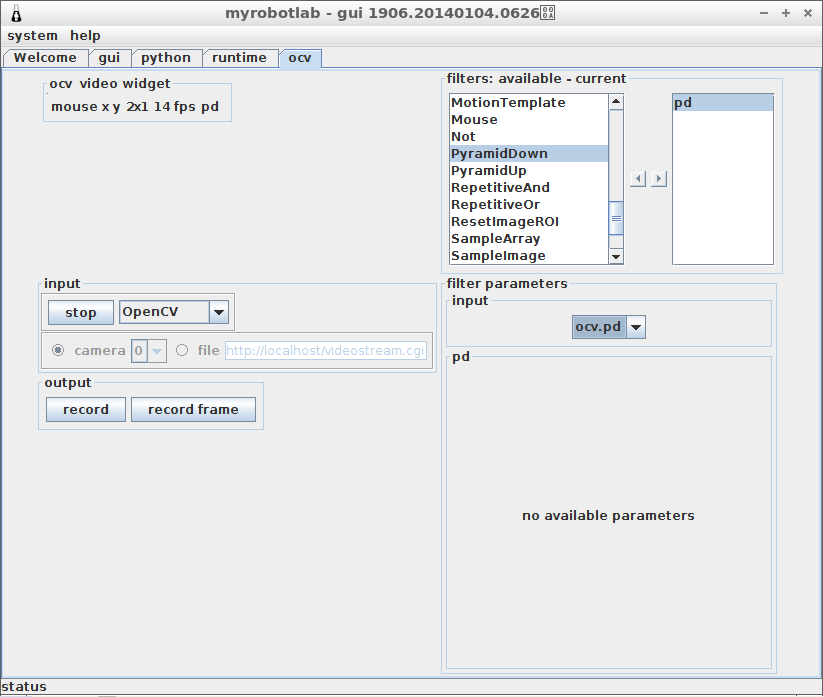
If it's a feature, it's an odd one. If it's a problem, well. . .I won't hit that button any more!
Now, if we can only get OpenNI back into MRL. . .
Wow... 21 fps.. How Much is
Wow... 21 fps.. How Much is odroid? Which version you Use? Ya... Grog, we need openni on MRL !!
Heh. It's actually faster.
Heh. It's actually faster. When I first started OCV, I was getting 27 fps. Then it dropped to 25. When I ran scrot to get the screen cap, it dropped to 21 and then back up to 25.
I have an Odroid X2, which by itself cost $135 plus shipping. You'll also need a 2A 5v wallwart for it, with a very small coaxial power plug. I happened to have one that fits my tablet. You'll also need a micro HDMI cable, It has an ethernet port but you'll need USB wifi and bluetooth adapters if you're interested in wireless. It has 2gig memory, but you'll need a class 10 SD card of at least 8gig. (For murrman's image, I reccomend at least 16gig.) Stay away from Hardkernels emmc cards on this board. They sell a small fan, but you probably won't need that either.
There might be a better, cheaper option. Hardkernal has been pushing a new board, the Odroid U3 which ships January 14 and is currently available for $59. It's got the same cpu and gpu (4412 and Mali 400) I'm guessing murrman will have an image for that one too. The price is supposed to go up to $65 eventually.
I learned some things about the X2 the hard way, and some things with the help of DJUtils, who also has an X2. If I did it again, I'd probably order the U3 and drop the fan and emmc module and save about $140 over what I paid.
WHOOOHOOO ! Nice work DWR !
WHOOOHOOO ! Nice work DWR ! 27 FPS with GUI .. WHOAAA ! ... wonder how fast it is without gui :)
ocv.publishDisplay(False)
would turn off the display, but there is no FPS reading then ... (I should fix that)
I think at 27+fps the Odroid would be quite a capable of running the Tracking service successfully.
So my agenda now is to get the opencv binaries frome the Odroid AND find some way to identify the ARMv7 so that it becomes an "easy" install for MRL on Odroid/BBB/MK808
A far as the bug - I think the issue is I don't have the "blanked" drop down labled clearly .. it should be "input" .. so when its blank its processing the input from the camera. What you did is set the input of the PyramidDown filter to its own output ....
So it recursively runs the PyramidDown on the same image producing a black hole singularity ! I'm glad you were not sucked into the vortex !
I think if you were to do the same thing with the PyramidUp .. you would get a BIG BANG !
Screenshot of AverageColor
Screenshot of AverageColor OpenCV filter w/ NIR cam
Wow... it still works
Wow... it still works :)
Average Color was one of my own creations.. Not really a OpenCV thing.. it's slow, but I always thought a tiled group of colors would be useful in some way.
The green square is the currently sampled location..
Might be neat if there was options to change the tile dimensions... would be kind of like the NIR python processing
This is my favorite filter
seems perfect for getting values of the right light.