InMoov2 version 1.1.518
Win-10
java version "1.8.0_202"
Java(TM) SE Runtime Environment (build 1.8.0_202-b08)
Java HotSpot(TM) 64-Bit Server VM (build 25.202-b08, mixed mode)
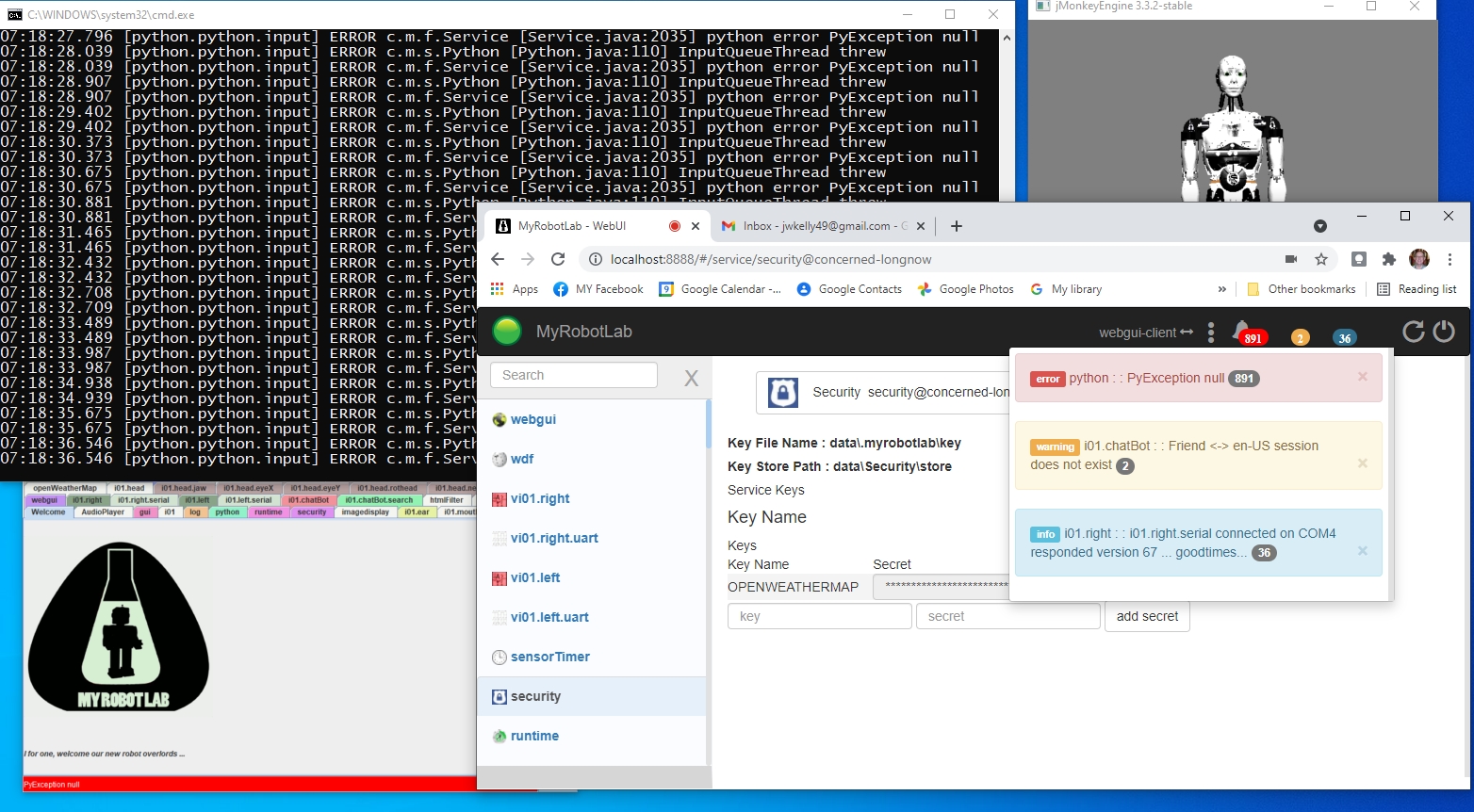
I can't get the install to show INTRO in the WebUI and virual mode won't activate.
During one install I did get INTRO to work but none of the "save config" seemed to work. (or virtual controllers)
As you can see I have c.m.f.service and c.m.s. python errors
shutdown is full of c.m.a. (ack not received) for everything and I have to restrat Windows to make sure everything is closed.
During startup robot speaks and says "alert ........ can't start every gesture."
Most of the time "noWorky" failed to send
I have captured the log file but can't see a way to attach it.
If you want to use Nixie
If you want to use Nixie version of MRL - (which includes Intro & InMoov2)...
You must install Java 11 not Java 8
Details of how to install and run even both are here ... http://myrobotlab.org/content/how-run-java-11-and-java-8-same-machine
Although you might just simply uninstall Java 8 and install Java 11
updated Java
I deleted java 8 and installed Java 11 and got the exact same behavior from myrobotlab.
No INTRO and same faults.
what does java
what does
java -version
return now ?
Java version test
Progress ! I suggest now you
Progress !
I suggest now you make a new directory...
something like this
mkdir c:\myrobotlab
Then download this jar http://build.myrobotlab.org:8080/job/myrobotlab/job/develop/lastSuccessfulBuild/artifact/target/myrobotlab.jar
into c:\myrobotlab
start a cmd shell
cd c:\myrobotlab
java -jar myrobotlab.jar --install
this part will take a while - go get some coffee
when its done ...
cd c:\myrobotlab
java -jar myrobotlab.jar
I now get the INTRO on the webUI
Using your suggested download and install/run procedure I got a webUI with the INTRO that allows me to select mouth/ears etc. and seems to work. As I configure robot parts they are added to the left side menu column.
The Win-10 cmd window shows a log of actions performed. It also does not have the repeating errors I saw before. When I use the webUI shutdown the Win-10 command prompt shows a short shutdown procedure and ends with an active command prompt. I can then start myrobotlab without having to restart the computer.
Using your command prompt method to start myrobotlab.jar it opens only the webUI and does not start the Jmonkeyengine or the SwingGUI windows.
If I go to directory C:\myrobotlab and use the provided BAT file (START_INMOOV.bat) I get the webUI WITHOUT the intro selection but the left column shows all the robot parts. It also starts the jmonkeyengine and SwingGUI and the same error messages that my original download (in directory mrl) had and fails to do a proper shutdown.
-------------------------------------------------------------------------------
Out of curiosity I used your startup (java –jar myrobot.jar) and the bat file startup on my installed version (in directory mrl) and get the identical behaviors explained above.
Excellent - it sounds
Excellent - it sounds worky.
Using your command prompt method to start myrobotlab.jar it opens only the webUI and does not start the Jmonkeyengine or the SwingGUI windows.
The SwingGUI is no longer supported. "Swing" is a very old display technology - The WebGui is what will be supported in the future.
There are multiple ways to start JMonkeyEngine.
So you know, Runtime service is the one which ultimately is in charge of starting or removing all other services.
You can create a new service anytime, by typing its name, type, and pressing the [ start service ] button
The way you probably want to start JMonkey however is through InMoov2
go to the Intro service - Press the InMoov tile
No on the InMoov2 service - see if you can find a simulator switch...
Bat files are not supported. We are currently working on configuration in the form of files which should work well with this UI.
Got it!
Okay, now I know to drop off my old expectations of what a startup looks like. I really like the look/feel of the webUI Great work!
Thanks
Before I start a new topic perhaps you can point me to a tutorial on how to use the virtual settings -- say maybe on how to raise the right arm.
There ya go
There ya go - http://myrobotlab.org/content/nixie-inmoov2-sim-pdq