Description
Getting started with myrobotlab - Having problems? Ask the nice people here.
Getting started with myrobotlab - Having problems? Ask the nice people here.
file taken from C:\mrl\resource\Arduino\MrlComm
trying to verify MrlComm before uploading to Arduino gives this error message
What is my best option?
Compilation error: cannot convert 'bool' to 'ListNode<Device*>*' in return

I'm using Inmoov2 version 1.1.701 to test my hand servos.There is a GREEN bar and a BLUE bar that adjusts the 'input' and 'output lock (?)'. I understand the orange 'rest' bars purpose but I don't understand the relationship between the input and output setpoints. Will you describe how to use these setpoints as a unit --- perhaps a finger example?
After install WebGUI fails to load correctly
I tried a restart of windows ........ no changes
I'm trying to use Windows Remote Connection but the same problem occurs using a direct connection.
win10-Pro / java version "17.0.1" / myroborlab 1.1.820
Chrome tries to go to http://localhost:8888/#/tabs
reports --
briefly says sent no data then switches to
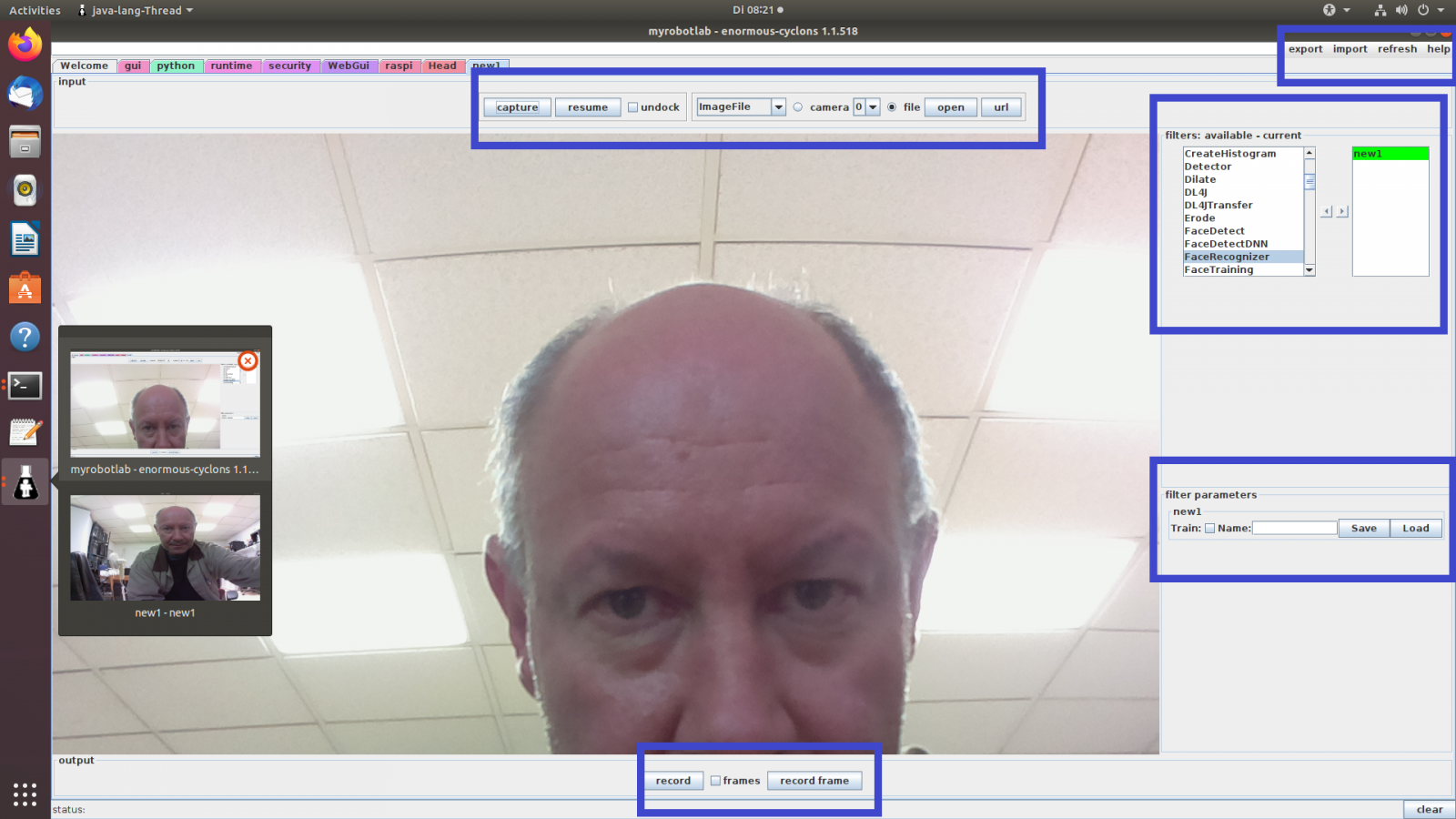
Can anyone show me where I can find information about how openCV is integrated in MRL?
I try to get openCV to run on Ubuntu 20.4. With manticore version when capturing a frame webgui freezes, no interaction is possible. With nixie, there is an error message "could not get valid frame".
Which version of the openCV libraries has to be installed in the system? What python scripts for openCV come with the installation of MRL and where can I find them?
Thanks for any support
gule
Hi All,
I have continued to work on the robot legs and have them 'static' walking
All the main support parts are made in aluminum
Still using RoboClaw boards for driving the 10 motors, all motors have encoders
New all joints have angle sensors
I have a IMU on the platform and am using roll and pitch
power is from 3 LION 3.7 volt cells on the top back, cells are from a hybrid car
I finally listened to Ray and have the weight on the top, inverted pendulum
Hi guys,
I would just like to say hello.
I have just started my printing of the InMoov Robot (eyes) and ordered some servo's
Tiny