Setup


A family of motor controllers which support a wide range of loads.
On a control level this motor controller is very similar to the Sabertooth motor controller.
It has similar ways to control it too. You can use a usb cable to plug a raspi, tablet or other computer directly to it. Windows requires a driver to be installed (Windows Driver) from ionmc download page, but the documentation says Linux & Mac will auto load a native driver which will work.
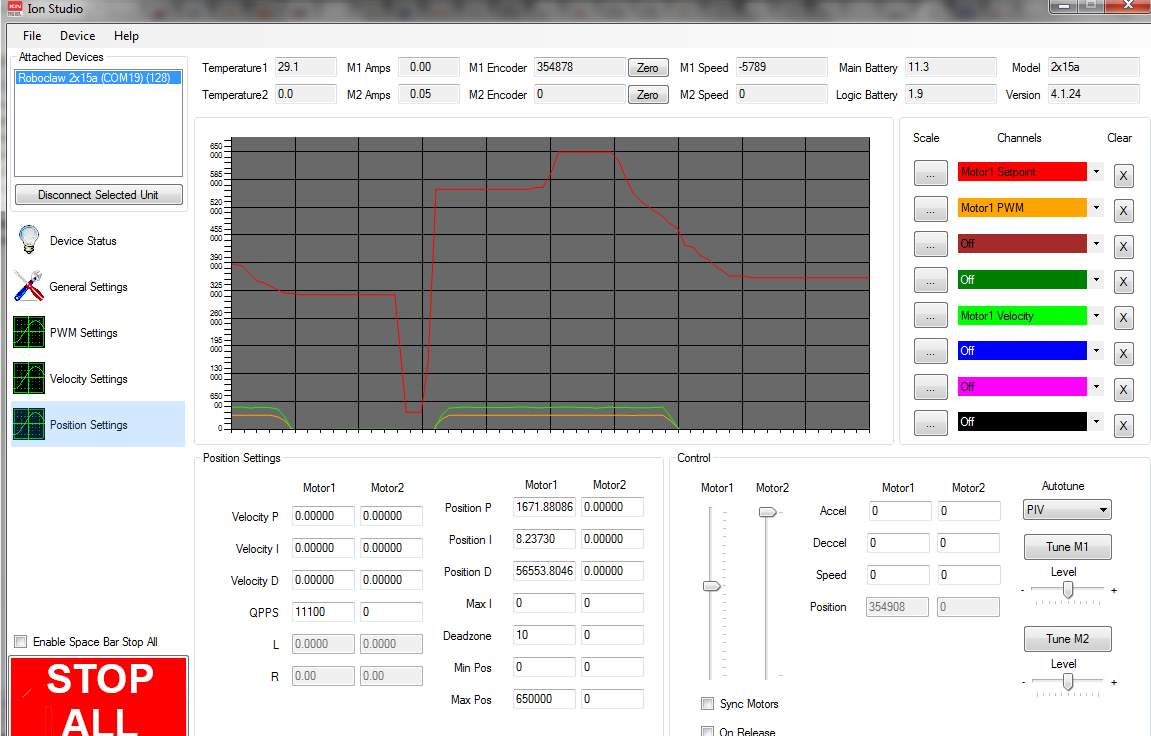
After loading the windows driver I installed the Ion Studio. It seemed like a well designed (closed source) C# application. It has graphs and counters of position and velocity. It would be nice to make a similar interface in MyRobotLab. But something which can control timing & multiple motors ... like this UI + ServoOrchestrator.
This is what the documentation said about connecting via USB :
We will implement Packet Serial for control just as it was done in Sabertooth, since it is the protocol which offers the maximum amount of functionality.
I just re-read the Sabertooth motor control and it appears that Sabertooth supports multiple addresses just like the RoboClaw. I'll have to consolidate the interfaces.
Wiring diagram for a single RobotClaw. The MCU could also be a tablet, raspi or other computer with a USB cable the usb port on the controller.

Here multiple RoboClaws could be wired up on a serial line or USB cable.







TODO - video of control
TODO - how to set PID and QPPS
TODO - finish script
TODO - auto-tune
MCG Brushless Servo Motor / Encoder
Serial 13DCME2443-4 (24 VDC)
Renco Encoder 77822-192
(color seems right, but pin numbers in pdf are wrong)
Wires :
Optical Switch
red +5v, blue gnd, yellow home signal - hooked to S4
Motor
red +24v and black gnd
Encoder
Red +5v goes to pin 3 on LM339D chip
black gnd goes to pin 12 on LM339D chip
yellow EN1 toward heat sink
blue EN1 toward edge of board
Velocity Autotune
P - 29221
I - 7721
D - 0
QPPS - 56118
Deadzone - 500
MaxPos - 10000000
PID
Velocity tuning first to set QPPS
PID Tuning
Example of Values
References :
# TODO: Implement this script fpr roboclaw = runtime.start("roboclaw","RoboClaw")...
!!org.myrobotlab.service.config.RoboClawConfig listeners: null peers: serial: autoStart: true name: roboclaw.serial type: Serial type: RoboClaw
glad to see
I am ready to try it when the service is posted
thanks!
looks like an item that will
looks like an item that will easily ruin your budget