I only want this Robot to entertain my family and friends. He must talk a lot. Moovement with mouth and head very important. Hand and arm moovement is and exstra. As long as it talks i am happy. If i can Intertain Kids and people i am happy.
I do not want my Robot to say " You Sed " in the begining of every order. Just that part must go.


[[AdolphSmith.py]]
Grog : The 16 Servo Controler
Grog : The 16 Servo Controler i just use for powering the Servos. I do not use it as a Digital controler. The Arduino control servo's alone
Great documentation Adolph...
Great documentation Adolph (very helpful)... We'll start evolving a script in the repo for your InMoov hybrid
Is the Tracking moving ? Is
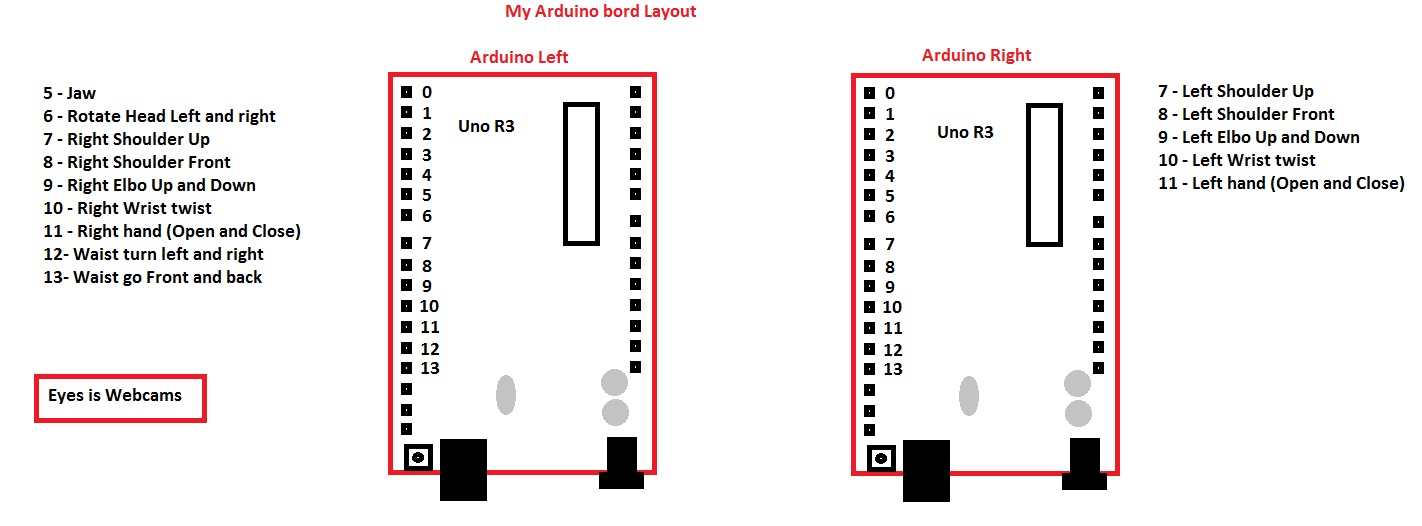
Is the Tracking moving ? Is COM15 the com port of the left Arduino ? I see a rotate head, but is there a pin for head up and down ?
The Comport at this stage is
The Comport at this stage is comport 10 and the head up and down is pin 13 and the head left and wright is pin 6 . Sory i have waste at 13 on list but at this stage until legs is finish it is head up and down. Hope this help.
My Jaw is pin 5.
Doesnt need to track at this stage. If you can just make it talk a lot of stuff and moove. Please. I am so curius just to let it moov. please.
Sory for my fults i am Afrikaans Speaking. Thanks again
My Clone Arduino Pin Layout
Where are we at
Where are we at Adolph?
Tracking working or no ?
Speech working ?
I can add MouthControl - but need to know the COM # of the right Arduino
Tracking work right Arduino
Tracking work right Arduino Com is 15
Can you put mouth on left arduino pin 5
Speech working but you didnt put mouth to talk
# script for AdolphSmith #
mouthControl.setmouth(162,155)
servoY.setRest(56)
If it is possable can you
If it is possable can you make head centre 56 and Jaw limits 155 and 162 please