hello ma. vo., If I think it's the example serial.ascitochar which receives the signal from the port so that you can discuss with Python. and proves it and I'll upload them to the project I'm doing.
Great, that it helped, although I just realized, that there is prossibly an error in it.
If so, try this:
#file : Serial.asciiToChar.py
import time
#create a Serial service named serial
serial = Runtime.createAndStart("serial","Serial")
def input(code):
decoded = ''.join(chr(code))
print decoded
#have python listening to serial
serial.addListener("publishByte", python.name, "input")
#connect to a serial port COM4 57600 bitrate 8 data bits 1 stop bit 0 parity
serial.connect("COM9", 57600, 8, 1, 0)
#sometimes its important to wait a little for hardware to get ready
sleep(1)
#write a series of bytes to the serial port
serial.write(87)
serial.write(79)
serial.write(82)
serial.write(75)
serial.write(89)
serial.write(32)
Maybe you want to share details of the project you are doing? Here are a lot of people on MRL, that have many ideas and could improve it. Also it is very interesting to see, what others are doing and get ideas form it/them.
I tell them what the idea of my proyecto.Yo have done a controlling 16 servos with the pic I sent him 2 decimal data serial port, the first thing is a number that defines the pin q is a servo to and the second control data is a number of 5 to 25 which is the equivalent of 0.5 ms and 2.5 ms of the pulses with the servos are handled. In this controller are connected bread and servos tilt webcam and want you to continue face the same manner as they apply with arduino. Already achieved with the controlling handle MRL is providing me help me put the data between services opencv and serial.
Haven't thought, you were that far, nice project! Keep it going!
If you need more help, ask here, somebody will sure see it and help you.
I don't know enaugh about the PIC and it's language, but if you (or somebody else here) do, it would be nice to create a Service & a script for the PIC (this is the important part) for it, which makes the microcontroller to MRL's slave (like GroG did with Arduino & MRLComm.ino or Gareth with Propeller(s)).
It would make interfacing with the PIC a lot easier.
BUT keep your project going on and please update it here (maybe you want to create a new Blog here and post it there (along with updates using "Edit").
Hello mecax, you could take a
Hello mecax,
you could take a look at the Serial service -> http://myrobotlab.org/service/serial
some examples:
-> https://github.com/MyRobotLab/myrobotlab/blob/master/src/resource/Pytho…
-> https://github.com/MyRobotLab/myrobotlab/blob/master/src/resource/Pytho…
but we can help you better, if you share a few more details with us.
I don't know about you servo controller, maybe we could "borg" it in.
Text, Links, Pictures, (Videos) - all that helps a lot!
aaa
hello ma. vo., If I think it's the example serial.ascitochar which receives the signal from the port so that you can discuss with Python. and proves it and I'll upload them to the project I'm doing.
Thanks.
Great, that it helped,
Great, that it helped, although I just realized, that there is prossibly an error in it.
If so, try this:
Maybe you want to share details of the project you are doing? Here are a lot of people on MRL, that have many ideas and could improve it. Also it is very interesting to see, what others are doing and get ideas form it/them.
THIS IS THE PROJECT
I tell them what the idea of my proyecto.Yo have done a controlling 16 servos with the pic I sent him 2 decimal data serial port, the first thing is a number that defines the pin q is a servo to and the second control data is a number of 5 to 25 which is the equivalent of 0.5 ms and 2.5 ms of the pulses with the servos are handled. In this controller are connected bread and servos tilt webcam and want you to continue face the same manner as they apply with arduino. Already achieved with the controlling handle MRL is providing me help me put the data between services opencv and serial.
THIS IS A PICTURE OF THE PIC:
and this is recorded on the pic in PICC language:
and this is the mess of things I have in the shop, controller and servos with pan and tilt webcam is: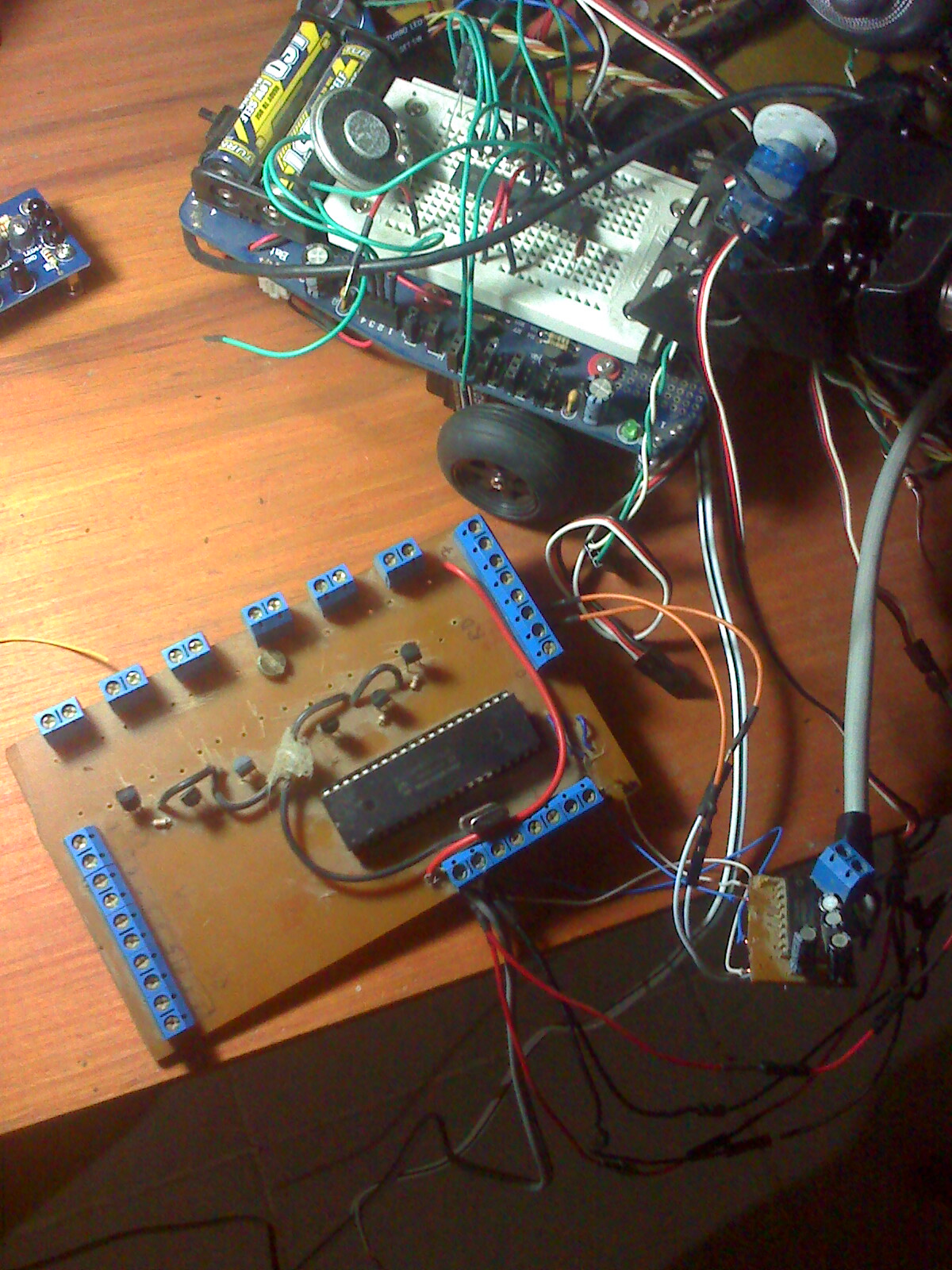
well I hope to advance the project, I greet you all
Great! Haven't thought, you
Great!
Haven't thought, you were that far, nice project! Keep it going!
If you need more help, ask here, somebody will sure see it and help you.
I don't know enaugh about the PIC and it's language, but if you (or somebody else here) do, it would be nice to create a Service & a script for the PIC (this is the important part) for it, which makes the microcontroller to MRL's slave (like GroG did with Arduino & MRLComm.ino or Gareth with Propeller(s)).
It would make interfacing with the PIC a lot easier.
BUT keep your project going on and please update it here (maybe you want to create a new Blog here and post it there (along with updates using "Edit").
Good luck in the future!