.png)
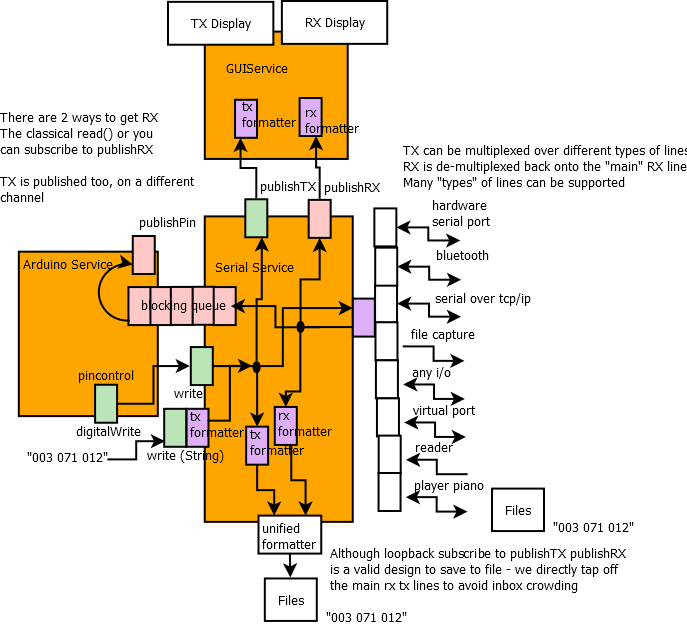
Serial service is a way to send and recieve serial data into and out of MRL
References
Architecture Diagram
Example code (from branch develop):
#########################################
# Serial.py
# categories: serial
# more info @: http://myrobotlab.org/service/Serial
#########################################
# uncomment for virtual hardware
virtual = True
port = "COM99"
# start the services
serial = runtime.start("serial","Serial")
python = runtime.start("python","Python")
gui = runtime.start("gui","SwingGui")
uart = None
# start optional virtual serial service, used for test
if ("virtual" in globals() and virtual):
uart = serial.connectVirtualUart(port)
# connect to a serial port COM4 57600 bitrate 8 data bits 1 stop bit 0 parity
# serial.connect("COM4", 57600, 8, 1, 0)
serial.connect(port) # default rate is 115200
def onByte(code):
decoded = "".join(chr(code))
print decoded
#have python listening to serial
serial.addByteListener("python")
def onConnect(port):
print "connected to port {}".format(port)
def onDisconnect(port):
print "disconnected from port {}".format(port)
serial.write(87)
serial.write(79)
serial.write(82)
serial.write(75)
serial.write(89)
# writing back from the uart to the serial service
if ("virtual" in globals() and virtual):
uart.write(87)
uart.write(79)
uart.write(82)
uart.write(75)
uart.write(89)
Example configuration (from branch develop):
!!org.myrobotlab.service.config.SerialConfig
listeners: null
peers: null
port: null
type: Serial