
This is the current state of my InMoov from the Front. Parts are being printed for the rest of him.

Freds back with his covers in place.
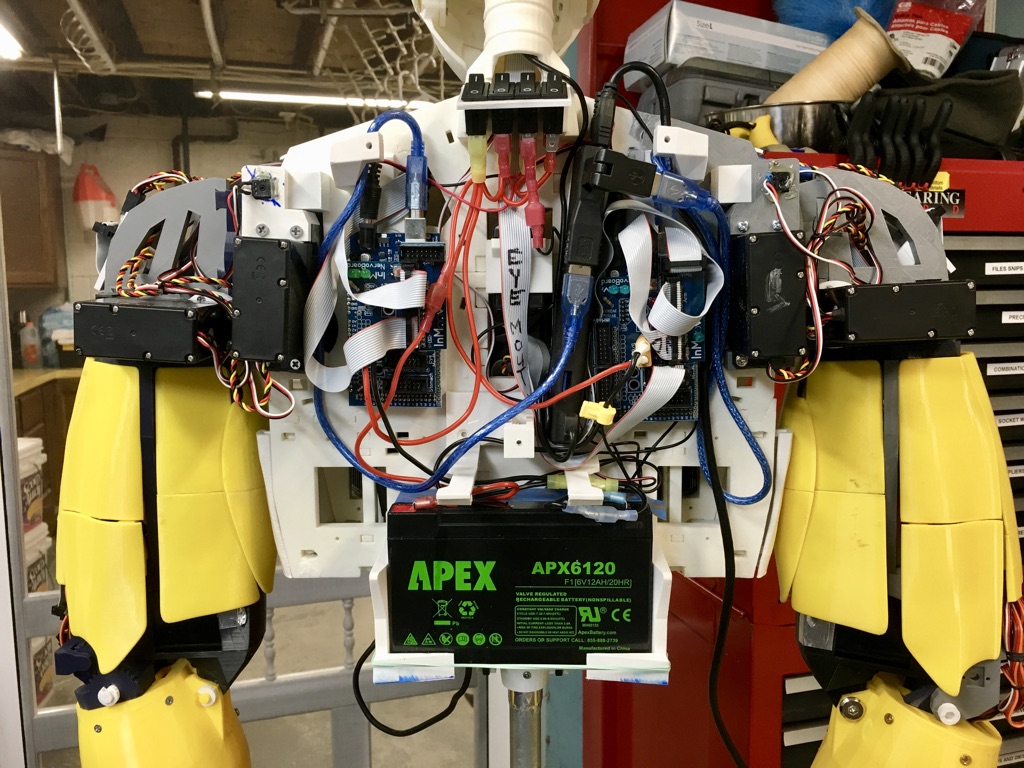
This image was taken a few days ago before I exchanged this malfuncioning 7 port hub with a working 4 port hub. I have also installed a Rio Rand voltage booster board just beolow his left Arduino Mega. Its a nice board easy to use and instal its output is adjustable and ha an LED display which can be easily swithced from readin either input or output so a bonus battery state indicator is now installed.
The wiring is mostly done with snap together lugs so that it can be easily modified. The third switch is for powering the usb Hub, and contains a Diode bridge to drop the battery voltage from a nominal 6V to 4.6 Volts. I should not need to power the hub at all since the 20 foot long usb cable is supposed to supply voltage for such things. If it turns out that 4.6 is too low I have a different Diode made up using a 1N4001 to drop it to 5.3V.
Now for my question. At this point I am only awaree of how to start myrobotlab and run the Arduino service and the Servo service to operate one servo at a time. It is time for Fred here (yes I borrowed that name it was ust too good not to and there should be room for more than one fred in the world), to move around like the videos posted by Gael Langvin and others. How do I do that?
Grog on the Shout advised I inquire of moz4r about how to run a python script. I know that several exist. I would like to locatre some of them and run them to impress my friends and family while I figure out how to get the Kinect operating.
Moz4r if your out there I could use some direction about how to get those python scripts to run and any other help you (or anyone else), feels like offering.
Thanks
Getting started with InMoov
That's s a nice build. You must have been working on him for a while.
You can find Gael's instructions here: http://inmoov.fr/how-to-start-myrobotlab/
The instrctions wil give you a good start with many things already predefined.
/Mats
Welcome MikeG to MyRobotLab
Welcome MikeG to MyRobotLab community site !
Nice build - excited to see more of your work :)
Mrl (MyRobotLab) is a collection of services created by a community of developers.
A quick outline of these services are available here - (matrix) http://myrobotlab.org/matrix.php?branch=develop
And each one is linked to a "Service Page" - which is supposed to be the definitive guide for that service.
The InMoov service page is here http://myrobotlab.org/service/InMoov - althought the images appear to be broken the "script" hopefully is WORKY !
I "hope" that you can test the hand, head, arm, & torso seperately - that at least was the original intent of the different services. Let us know.