The new build server is now building MRL ! Additionally, there is a new status bar at the bottom of the GUI which is now beginning to be utilized as a display for important information, warnings, and errors. Quicker than looking through logs !
The new build server is now building MRL ! Additionally, there is a new status bar at the bottom of the GUI which is now beginning to be utilized as a display for important information, warnings, and errors. Quicker than looking through logs !

New Build Server !
Or at least new operating system - now Ubuntu 12.10. It used to be a very old Fedor system, so getting the hang of Ubuntu is going to take a little while. Right now I'm rebuilding X11 with an amazing crazy script which uses all processors to do the compile. This will by my 5th attempt since it overheated and shutdown on all previous attempts. Now I have a cup of water to cool it down.
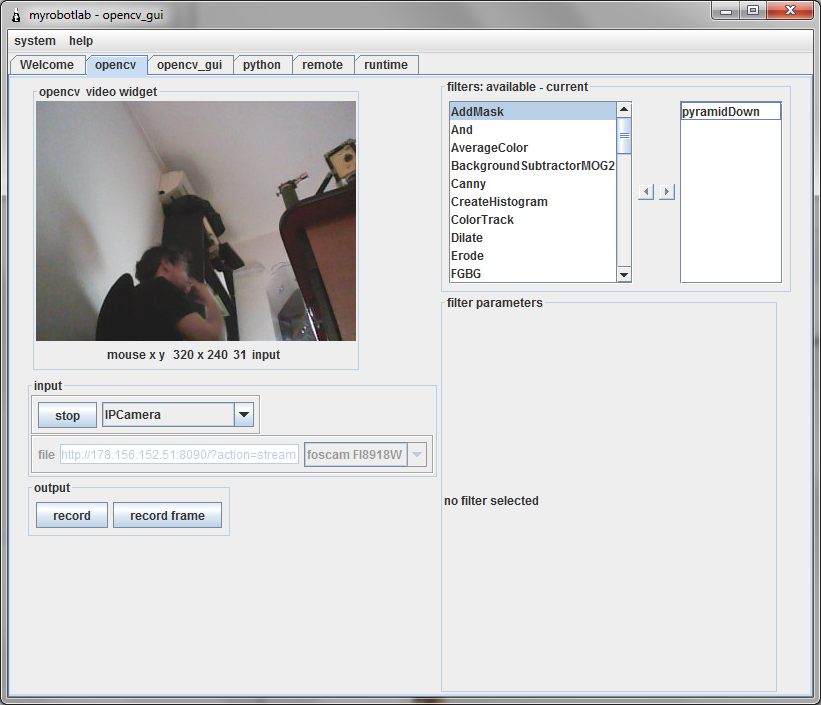
Face tracking using opencv + facedetect filter with my pan/tilt kit...
Facedetect filter is heavy, and webcam video flow delay from servos response...this leads to overshooting
GROG..i need a lighter facedetect filter.....video stream is slow when i apply pirdown and face detect :(
Here is the video...
CHECK IT OUT !
How to control LED with microcontroller 8535 communication TCP/IP Starter kit NM7010A..?
I have a microcontroller ATMega8535 with avr low cost micro system, avr low cost micro system have 4 port A,B,C,D port to I / O microcontoller atmega8535
'-------------------------------------------------------------------------------
package vlcj;
Hey all roboteers,
Been busy of late. Working lots and playing too little.
Did get my arduino mega and assorted stuff in the mail and have been getting used to those parts when I can.
http://www.ebay.com.au/itm/160890643358?ssPageName=STRK:MEWNX:IT&_trksi…
A short update between working and sleeping. Here is the latest pic of my printed parts for my inmoov robot.

Tinhead, the super-vampire robot builder has created a raspberry pi bot which will stream off video from a webcam mounted on the pi to his PC. The PC will consume the video stream and process it in OpenCV then call back to the Pi bot control messages. Distributed Robotics Rock !
UPDATED (PID added and WORKS :D)