It looked good "initially"

But Then..... there's a skewe....
I'm guessing a bump in the X or Y acess which was propegated over all pieces of a certain height..

It looked good "initially"
But Then..... there's a skewe....
I'm guessing a bump in the X or Y acess which was propegated over all pieces of a certain height..
Arm - Raspberry Pi.png)
Arm - BeagleBoard Black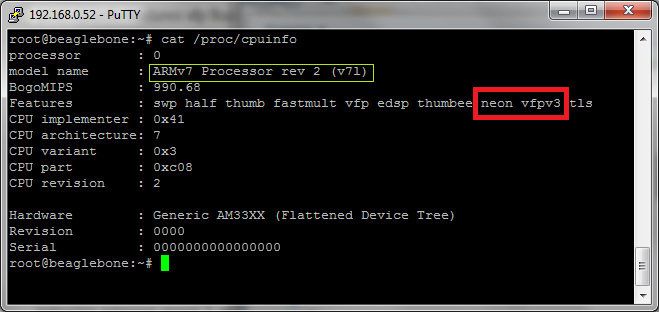
Arm - Odroid

Hopefully these InMoov parts will be pulled out of the printer next :)
Developers are version crazy.. We love versions ! But there's a reason for that, its to catalog all the pieces of software so they worky together. If you have put together a softwar stack 20 layers deep (module on top of application on top of JVM on top of Operating System on top of Device Driver ......) if just One of the pieces is the wrong version you can have a system which looks like this....

I haven't been very active on the MRL website for a while now, but I haven't really left. Lately I've been playing around with an Odroid X2 which is a very capable ARM dev board.
Murrman, a user on the Odroid forums has created an Ubuntu based image for the Odroid X2 that includes ROS, OpenCV, and OpenNI including drivers for the Xtion Pro Live sensor.
Hola gente, quiero compartir con ustedes mi humide proyecto de una cabeza robot moustro que fabrique inicialmente con la ayuda de mi hija de 3 años pegando papel de diario a un globo. Gracias por la ayuda de ustedes pude hacer face detection em este proyecto. Todavia tengo muchisimo para aprender asi que me vienen muy bien las ideas y sugerencias que puedan aportar. Como ven no tiene ningun sensor colocado aun, pero pronto lo tendra.
Hi Grog,
Is it possible to have a command within the InMoov script that does not need to be confirmed before the program carries out the command?
One command that I would like to create would be "STOP", so that if the robot is heading for trouble I can stop it's motion very quickly.
Thanks,
Bob
.png)
Canny edge filter - over video streamer

# start the service beagleboardblack = runtime.start("beagleboardblack","BeagleBoardBlack")
Skeleton of Beagle Board Black service. Primarily this service will allow access through Java to the GPIO of the BBB.
Needs a Pi4J code to be ported to a BBB4J library ? Project is just starting.
I have an old Chumby One that I wanted to use as a robot controller. GroG installed MRL on a USB stick and I had an external USB hub to connect the stick, the webcam, the Arduino and a Roomba interface. I'm trying to get rid of the USB hub, so here is the new setup:
- MRL on a partition directly on a larger uSD card in Chumby
- Arduino moved from USB-FTDI to hardware serial interface
- webcam directly on the USB port
- no more Roomba, different robot hardware