Italian Christmas has arrived !!! :)
Here is Quadcopter parts :


Italian Christmas has arrived !!! :)
Here is Quadcopter parts :
(3).jpg)
Well both of Rob's arms are strung up tested and ready for action. Just have to mount Bicep servos and start bothering Grog for programming help. I love this project.
This is a script i made for Gael months ago... He said it was worky for him...
In this script only shoulder and bicep servos are involved...
At the start of the script number of joints(2) and lenght of the joints is declared (upper arm and forearm)... Then the script moves the hand from a (555,0,0) position to a (750,0,0) position... (x,y,z)
So the hand moves in front of inmoov on a "virtual" line
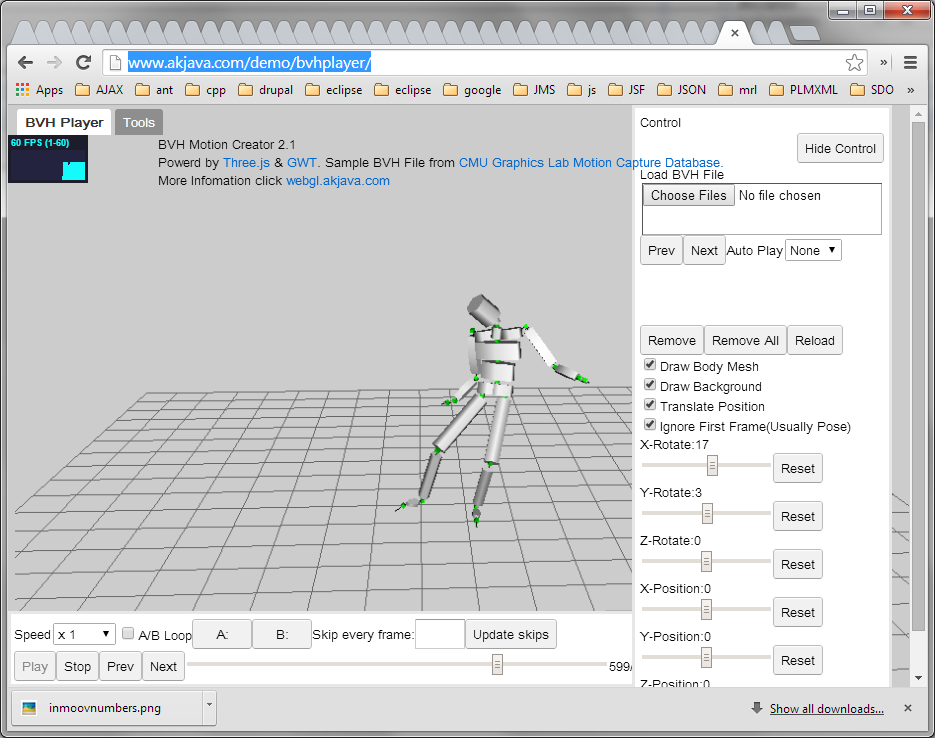
To display IK i've been trying to decide between Java3D(old and no longer supported or developed), JavaFX (new engine from Oracle), & WebGL + Three.js - Looking around I found this ! (wow - very nice !)
More interesting WebGL IK Information - http://www.kadrmasconcepts.com/blog/tag/webgl/
public float angleOf(PVector one, PVector two, PVector axis) { PVector limb = PVector.sub(two, one);

Well the last of Robs digits are coming off the printer. Not long now before we see the real show.
Can hardly wait to start trying some of the latest developments in MRL. Thanks to all the power players that make this all possible.
Dwayne
Now what was it? "Avada Kedavra" .. something ?
Well JInput downloaded and tested with these handy step by step guide creates an EVIL ELF !!!
java.lang.UnsatisfiedLinkError: /home/pi/jinput/dist/libjinput-linux64.so: /home/pi/jinput/dist/libjinput-linux64.so: wrong ELF class: ELFCLASS64 (Pos
That's not what we want... But it's open source Yay !
We'll need to Use the Source, Luke
Setting "omoplate" servo and potentiometer to default "Rest" position 10 on a range from 0 to 180
To reach this value you may have to rotate slightly your potentiometer in it's bracket.
.JPG)
When omoplate is at default 10 position there is no gap between these two parts

See video for the omoplate movement: