This is a script i made for Gael months ago... He said it was worky for him...
In this script only shoulder and bicep servos are involved...
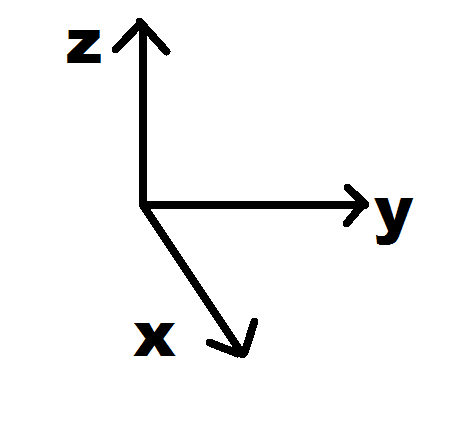
At the start of the script number of joints(2) and lenght of the joints is declared (upper arm and forearm)... Then the script moves the hand from a (555,0,0) position to a (750,0,0) position... (x,y,z)
So the hand moves in front of inmoov on a "virtual" line
[[InMoov2.inverseKinematics.py]]