an idea:
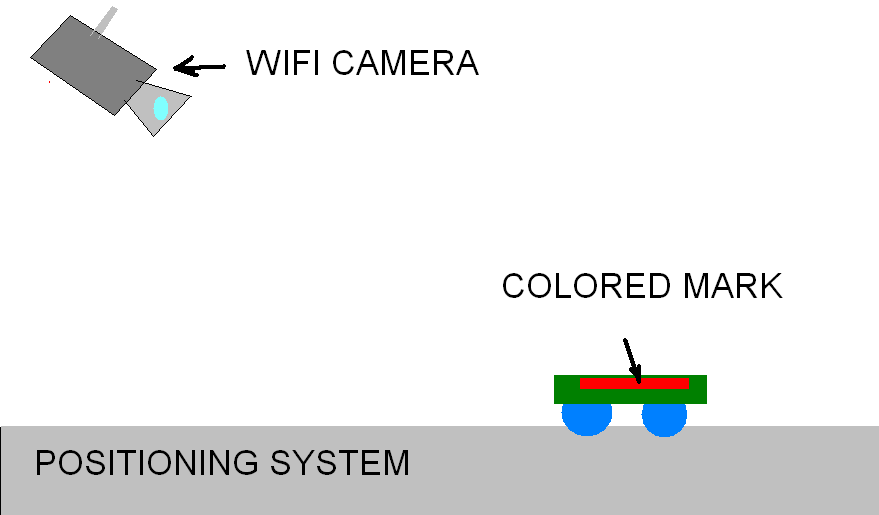
What if the robot had the vision of a fixed wireless camera located in a room and the robot places a colored mark that identifies you to also have location where the robot is, by some algorithm. I think if the color detection functions effectively could work.
I agree Mecax .. a good idea
I agree Mecax .. a good idea ! :)
http://myrobotlab.org/node/63
yes,that it spoke
yes, that it spoke. Is a service?
Its several services - OpenCV
Its several services - OpenCV + Motor + Arduino ...
good thanks grog
good thanks grog