vm_info: Java HotSpot(TM) 64-Bit Server VM (25.291-b10) for windows-amd64 JRE (1.8.0_291-b10), built on Apr 9 2021 00:02:00 by "java_re" with MS VC++ 15.9 (VS2017)
Ahoy JoeC ! :)
How how would you like to help us with the new and vastly improved Nixie (soon to be released) version ?
I don't know what servo calibration does .. I did not write it ...
manticore may have the rxtxlib which is inferior to the newer and more "sane" jssc library for serial communications - which your core dump appears to be related to
GroG, I would be happy to help. I have completely build the Imoov Robot and just lacking the software side of it to get it going.. I am not a programmer, but I am learning.
Having multiple versions on the puter at the same time can make things very confusing ...
so small understandable steps .. towards Nixie ..
remove Java 8 .. install Java 11 64 bit for windows
Download the latest - I like to download into a "clean" directory ..
For example, create a directory where you like to work - name it 409,
download the myrobotlab.jar from the above link into 409.
Do the full install - from a command line in the same directory type
my command line will look different from yours because I'm using Linux but the exact command should be the same.
It will take a while to install things (especially over a slow internet) - so enjoy your favorite beverage..
When its done.. type this
without the --install
If all goes correctly you should have a webgui in front of you ... On to "services"
A service is a building block of myrobotlab, like blocks in Legos. I think there are around 140 types currently. The rules are, you can have as many services as you want running at the same time in MRL, but they all need to be uniquely named.
On the left you can see 5 services:
They are "named" webgui, security, runtime, python, and intro.
Each service has a type - this is what it does. The types of these services are WebGui, Security, Runtime, Python and Intro. Clever naming no ?
One of the more interesting services is runtime. Its one of the few services for which there can be only one of that type. For example, you can have 30 Servo services as long as they are uniquely named, but you can only have one Runtime service.
What does a Runtime service do ? I'm glad you asked...
It makes or destroys other services.
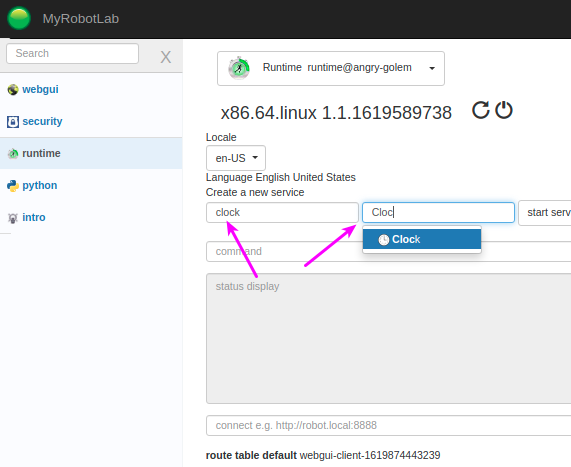
Make a clock service.
Behold ! a little service that makes a timer - the timer can send out pulses .... goodtimes.
You can remove it by "releasing" it ...
One button not many people know about is the "export" ...
press it ..
This export will save a file to data/export.py ... its not "perfect" by any means ..
but what it provides is a rough program that roughly represents the current state of MRL.
Here is what data/export.py
Remember the clock we started .. and the other services ?
Now you can start tweaking things in the file ...
lets add a line and start the clock
If you stop everything ... by typing shutdown or pressing the shutdown button
Now type the following
This tells mrl to start and tells the python service to execute the file we just modified. What happens !?
it all starts up .. and there is our running Clock ! WooHoo !
So now go and experiment more... remember if you export.py it will overwrite that file (a reason why I have not told many of this ability) - so if you like the file you've made save it in a safe place with a different name.
I downloaded, installed and got the new GUI up and running. I installed the New version of INMOOV and had started to play around with it a little bit today. Thanks for your Help GroG, I really appreciate it.
The controller tab says connected to Arduino, however when I try to attach the sevo I get that error message after a few moment light in the last post. I have disconnected and reconnected, changed arduino's and ports. I am at a loss again. I have the MRL.ino loaded on arduino, connections set to 111520, connect to arduino, however the servo does nothing.
Finally got it to work, had to replace my USB cable to my arduino with a shorter cable, apparently it would connect to the arduino, but not transmit signals would get lost from the transmission of the program for some reason. I have attached a 3 foot cable and I can visibly see the difference in Led brightness now with the TX/RX lights when signals are given from MyRobotLab. Still working on getting the parameters for all the servos, but at least I can control them now.

I have reloaded Java, MRL, pasted a copy of the error log, help
I have reloaded Java, MRL, InMoov, all works fine in virtual, when I try to connect to a servo to calibrate it fails everytime.
Here is a copy of the error log
Ahoy JoeC ! :) How how would
Ahoy JoeC ! :)
How how would you like to help us with the new and vastly improved Nixie (soon to be released) version ?
GroG...Yes I would
GroG, I would be happy to help. I have completely build the Imoov Robot and just lacking the software side of it to get it going.. I am not a programmer, but I am learning.
How do I get started with
How do I get started with Nixie? I am ready to give it a try and bring my Inmoov to life.
Programming == start
Starting small - myrobotlab.jar needs java to run ...
what Java do you have..
run the following
java -version
mine says ...
My Java version
ok .. if you want to start
ok .. if you want to start trying Nixie, you want to install Java 11.
https://www.oracle.com/java/technologies/javase-jdk11-downloads.html
But before that .. you want to remove Java 8
Having multiple versions on the puter at the same time can make things very confusing ...
so small understandable steps .. towards Nixie ..
remove Java 8 .. install Java 11 64 bit for windows
New Java installed
Download the latest - I like
Download the latest - I like to download into a "clean" directory ..
For example, create a directory where you like to work - name it 409,
download the myrobotlab.jar from the above link into 409.
Do the full install - from a command line in the same directory type
my command line will look different from yours because I'm using Linux but the exact command should be the same.
It will take a while to install things (especially over a slow internet) - so enjoy your favorite beverage..
When its done.. type this
without the --install
If all goes correctly you should have a webgui in front of you ... On to "services"
A service is a building block of myrobotlab, like blocks in Legos. I think there are around 140 types currently. The rules are, you can have as many services as you want running at the same time in MRL, but they all need to be uniquely named.
On the left you can see 5 services:
They are "named" webgui, security, runtime, python, and intro.
Each service has a type - this is what it does. The types of these services are WebGui, Security, Runtime, Python and Intro. Clever naming no ?
One of the more interesting services is runtime. Its one of the few services for which there can be only one of that type. For example, you can have 30 Servo services as long as they are uniquely named, but you can only have one Runtime service.
What does a Runtime service do ? I'm glad you asked...
It makes or destroys other services.
Make a clock service.
Behold ! a little service that makes a timer - the timer can send out pulses .... goodtimes.
You can remove it by "releasing" it ...

One button not many people know about is the "export" ...
press it ..
This export will save a file to data/export.py ... its not "perfect" by any means ..
but what it provides is a rough program that roughly represents the current state of MRL.
Here is what data/export.py
Remember the clock we started .. and the other services ?
Now you can start tweaking things in the file ...
lets add a line and start the clock

If you stop everything ... by typing shutdown or pressing the shutdown button
Now type the following

This tells mrl to start and tells the python service to execute the file we just modified. What happens !?
it all starts up .. and there is our running Clock ! WooHoo !
So now go and experiment more... remember if you export.py it will overwrite that file (a reason why I have not told many of this ability) - so if you like the file you've made save it in a safe place with a different name.
Thanks GroG
I will download later tonight and start tinkering.
New MRL downloaded
I downloaded, installed and got the new GUI up and running. I installed the New version of INMOOV and had started to play around with it a little bit today. Thanks for your Help GroG, I really appreciate it.
I can hook up to the arduinos, however I can not control them
am I missing a function to start?
Not sure what I'm missing
Don't use the SwingGui with
Don't use the SwingGui with Nixie,
use the WebGui
I have tried the Web GUI as well same results
Web Gui shows I'm connected and energized but it does not
I have tried bot ways with swing GUI and Web GUI, neither way actually connects to my arduinos to send power to the servos.
controller tab shows as
controller tab shows as connected ?
did you try detaching and re-attaching?
are you attaching through a script or through the gui ?
I am attaching through the GUI
The controller tab says connected to Arduino, however when I try to attach the sevo I get that error message after a few moment light in the last post. I have disconnected and reconnected, changed arduino's and ports. I am at a loss again. I have the MRL.ino loaded on arduino, connections set to 111520, connect to arduino, however the servo does nothing.
servo error
Finally got it to work, had
Finally got it to work, had to replace my USB cable to my arduino with a shorter cable, apparently it would connect to the arduino, but not transmit signals would get lost from the transmission of the program for some reason. I have attached a 3 foot cable and I can visibly see the difference in Led brightness now with the TX/RX lights when signals are given from MyRobotLab. Still working on getting the parameters for all the servos, but at least I can control them now.