hello ...i have built the left inmoov arm and hand, it is connected to myrobotlab via usb and connected to the nevoboards with 6 volts power supply... i start a existing simple hand.py with voice comand ...everything works fine exept for two things i dont understand:
FIRST ::when i says a voice command like : close your finger (it is for the hole hand)
inmoov just say : closing my finger ,,and then closes is fingers ...that is good ...perfect
for all actions...finger to the middle ,,,open ,,,,close...rest...relax...
but in all the exemples i see inmoov repeat :; did you says close my finger and i should answer yes before it mooves
i dont have to say that actualy
SECOND:i tried the 2 ways to capture gesture,,, none works
first opend and new .py ...then adjusted the cursors to the wanted position then said capture gesture
-Set the servos at the positions you like using the cursors in MRL.
-Create a new python file on MRL.
-Say in your microphone “capture gesture“.
-Confirm with “okay”.
-This will create a text with all the positions of your servos in the new python file.
It should look like this:
the lower exemple did not copy like it should ....just taken from the net should be showing position degrees ......etc
inmoove answers capturing this gesture .....but no window like the exemple above ....i dont find it anywhere...should be in the new .py window i opened ???
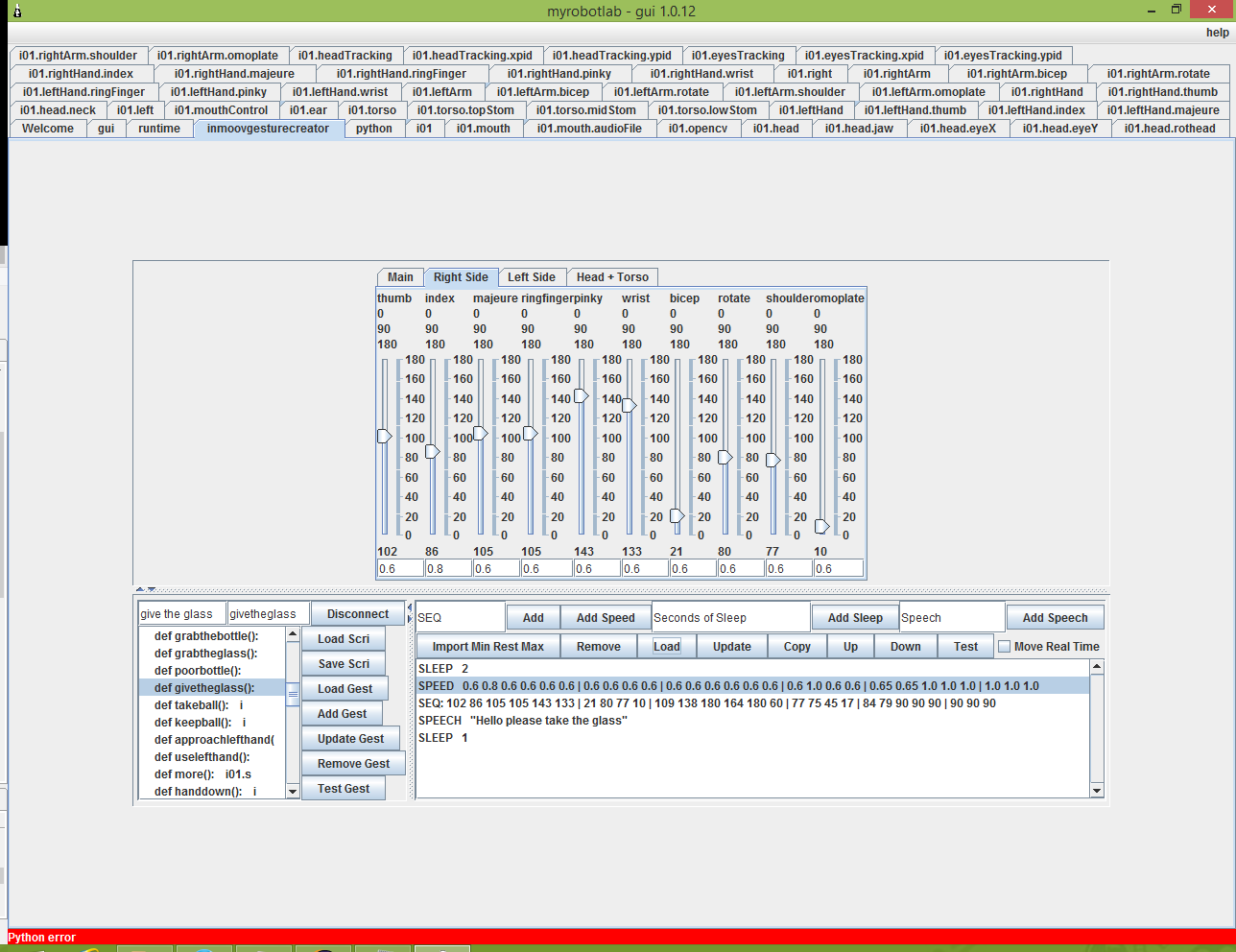
and the second method:::(the lower pic is just an exemple from the net )
i click on connect ...but when i adjust the cursors ...nothing moves ...nothing record..
the 2 windows under the cursors just stay empty
is there something i did not understant correcly or did not do????
Firstoff: I don't have an
Firstoff: I don't have an InMoov, so I'm not the best resource for this.
I can't say anything about the first method, but concerning the second one (InMoovGestureCreator):
It currently is kind of broken / in a very bad shape.
It may be able to move servos, but certainly only when the check box "Move Real Time" (or something like this) is ticked. Exporting/Saving gestures is broken with a probability of at least 90%.
I suggest to learn to write the required python/aiml code yourself as this will not only allow you to create basic gestures yourself, but also create complex programs in the future. To start you'll probably want to copy an existing gesture and modify the values to your liking (maybe to the ones you got by experimenting in the gesture creator?). Try things out, that's the only way to learn.
Regards,
x MaVo
good idea
thanks that s a great idea ..modifying an existing py..and renaming it .....i will try that
but still if someone out there can explain to me why the first methode is not working
i would like that
Hello, To answer your first
Hello,
To answer your first question:
The videos you are refering where InMoov needs approval by YES or NO, is related to the version of MRL myrobotlab.1.0.107. Very old version.
The recent versions of MRL do not need approval to engage a gesture (except python gestures that are implemented with approval), for exemple WOULD YOU LIKE TO DANCE, the robot will welcome to join him and then will say SHALL WE DANCE, you will then need to say YES or NO to start the next random dancing gesture.
Thanks to ProgramAB which can understand much more complex sentence via WebkitSpeechRecognition than Sphinx, we do not need to approve each gesture.
To answer the first part of your second question:
Regarding capturing a gesture via the voice command: CAPTURE GESTURE, we have something not working in recent versions that needs to be fixed.
thank s for clarifications
thank you Gael for your clarifications ....i tought i was doing something wrong or my installation was not working right....
can you tell me where i can find an easy ,,step by step guide to how to create and implimante a new inmoov gesture .PY (with voice commande)
in myrobotlab