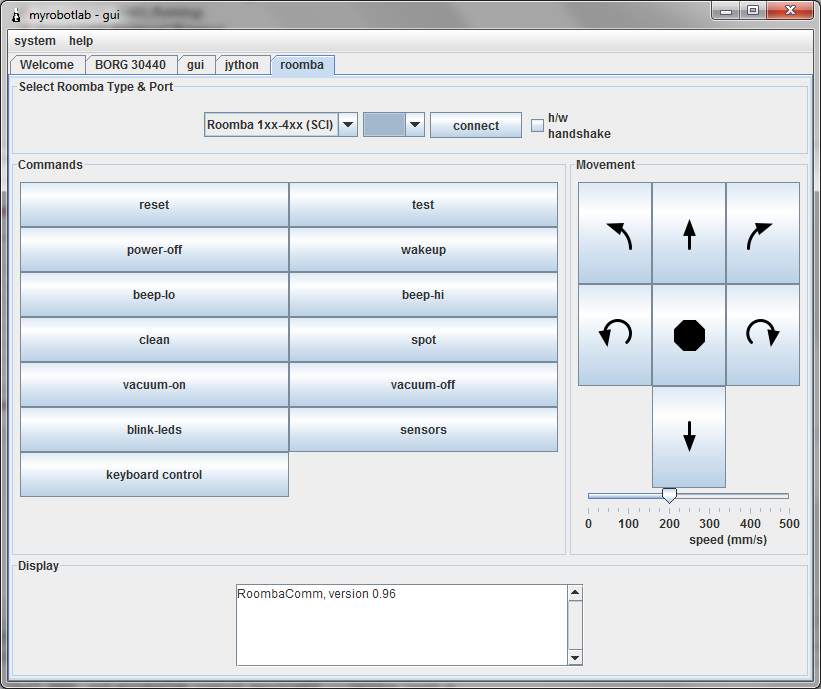
This service allows MRL to connect to a Roomba. The GUI Service provides the RoombaComm http://hackingroomba.com/code/roombacomm/ for manual control and testing.
Programmatic control can be done with Python through the Python service.
Reference for the Serial Control Port
Example code (from branch develop):
from org.myrobotlab.service import Runtime
from org.myrobotlab.service import Roomba
from time import sleep
roomba = Runtime.create("roomba","Roomba")
roomba.connect( "COM9" )
roomba.startService()
roomba.startup()
roomba.control()
roomba.playNote( 72, 10 )
roomba.sleep( 200 )
roomba.goForward()
roomba.sleep( 1000 )
roomba.goBackward()
roomba.sleep( 1000 )
roomba.spinRight()
roomba.sleep( 1000 )
Example configuration (from branch develop):
!!org.myrobotlab.service.config.RoombaConfig
listeners: null
peers:
serial:
autoStart: true
name: roomba.serial
type: Serial
type: Roomba