
Its scanning, the stealthy Dual Time of Flight wiring was a soldering pig to execute (or should I say "Exterminate").
Data is flowing.... at momo a bit strange 200 Steps = 360° (until microstep instigated giving theoretical 1/16 steps ermm if my maths is correct 3200 Steps for 360° however at the price of speed)
In the current set up it is possible to gimbal the lasers both on the X and the Y orbits (i.e. putting the robot on its side and using one of the drive wheels as one of the Gimbals. (it could be redesigned as a pure standalone 3D scanner ...I think I am talking myself into another project.... darn it.... \ö/ )
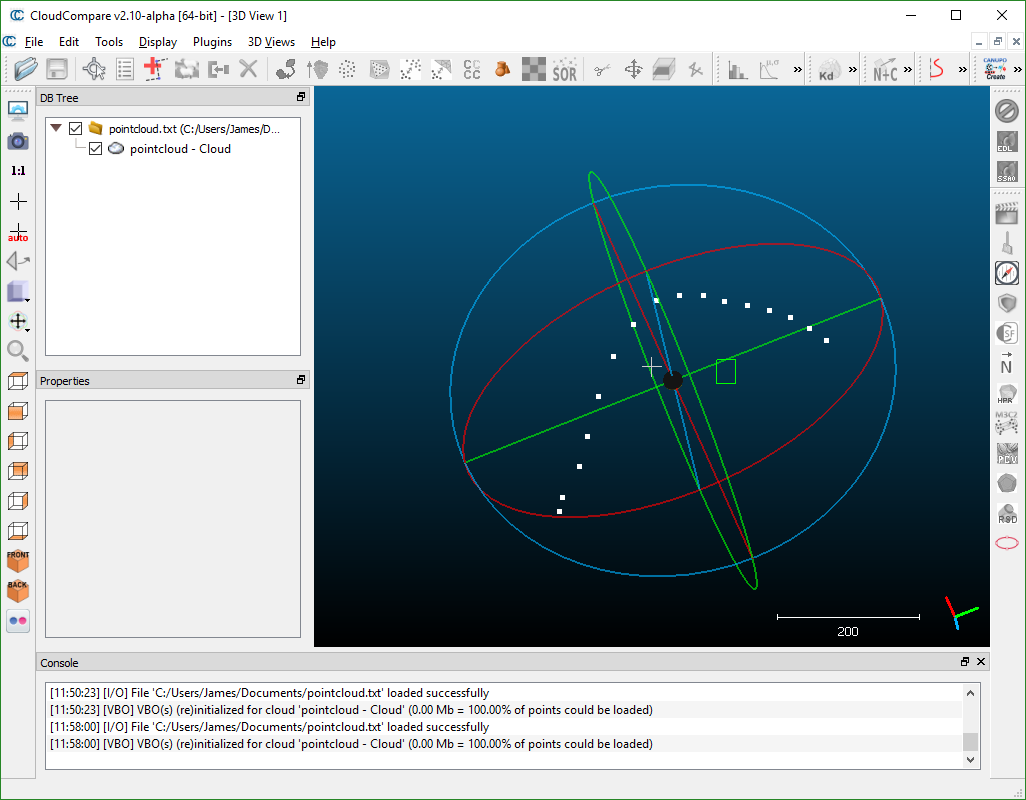
A quick PointCloud of first few points after  reveals :-
reveals :-
|
Converting Polar to Cartesian coords. x = TOF_Scan × cos( TOF_Angle° ) : y = TOF_Scan × sin( TOF_Angle° ) |
Current 3D mount block will take 4 modules...

Now I need to find best way to - work with/display - the information......
.... ideas greatly welcome....