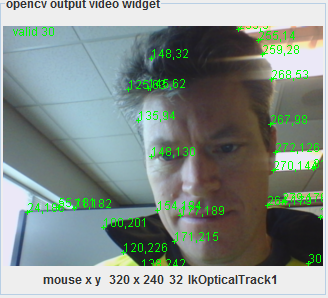
Yay ! - LKOptical tracking filter tracking 30 points simultaneously ! The Tracking service can proceed .... Wooh .. about time ! Still need to write a bug up for JavaCV, but the filter works around it.
.png)
Added an ouput panel - which allows recording of a video stream or individual frames from the output stream.

The AVI is saved with compression (a compression dialog pops up). And the individual frames are saved with the frame index as jpgs. This should help people share their output with one another. At some point I'll make it that you can save processed image streams too, instead of just input.
I know I've been quiet recently, been busy re-working & upgrading OpenCV service in MRL. This includes moving to the latest supported version of OpenCV & JavaCV (ver 2.4.3 & 0.3 respectively)
Under the hood the sub-framework which moves data from the gui to the filter has been completly re-vamped. Although you cant see the immediate change, this will be faster and more robust updates to the filter gui's - soon more filters will have controls which you can easily change.
Previously, filters would only be added to the gui when the video capture was running, this has been fixed along with making the video capture thread safe.
Another (soon to be) helpful update is the the context sensitive help/info which can be invoked on every filter. Got a lot more documentation to do :)
Screen grab - right click -> Canny Info

Canny Info is hyperlinked to this
Still have some issues regarding LKOptical tracking, but I suspect I'll get through them soon.
2013.01.19
Did an initial build of 4 platforms x86.64.windows, x86.32.windows, x86.64.linux & x86.32.linux. Superdog was kind enough to supply a x86.64.mac build and inform me that the mac support is a bit of a "challenge". Currently, I have tested x86.64.windows (works), now I'm trying to test x86.32.linux. I noticed a interesting change. The first step I usually do is clean/remove all references to any previous builds - strangely I found some of the executables of OpenCV to run even after this clean (which never previously happend). I was flumoxxed ! Linux wants it on the LD_LIBRARY_PATH, and there were no OpenCV libraries there.. how could it be working. I renamed my build output from lib to lib2 - then it would no longer build. Whaaa? OpenCV attempts to load off a hardcoded relative path ! This is new... probably saves a lot of support forum posts to do this.. hmmm...
Anyway, its not working currently in MRL..
Back to work...
Cleaned everything - did an OpenCV install through MRL - lkdemo works ! Alright,, now time to look at the JavaCV bridge
Ha ! Works ! I probably had some conflicting 2.4.2 so's around... WooHoo !
On the mac side, I asked a friend if I could borrow a OS X installation disc - so I could actually do a build on a virtualized mac, since I don't have the hardware...
Now finally, done with enough supporting software, I can finally look into developing.. I left off with the LKOptical tracking filter was mis-behaving. It seems that it could only track one point. Grrr ! Finally, I saw a little example code in the javacv src, in which it looks as if a "count" variable has changed from a single integer variable to an array. Yikes .. that's big.. trying to correct the filter now.
Great work, the image capture
Great work, the image capture is going to be of good help! I need to test that when I get a minute.
Currently it's using OpenCV's
Currently it's using OpenCV's recorder which on my windows 64 machine popped up a "type of compression" selection to use.
I tried "Microsof's RLE" compression - which did not work, there were several other selections. The one which worked best for me was Xvid compression.
"Soon" I'll try to integrate the FFMpeg (which is a vastly better recorder) .... soon ... it's on my list ....
Hey all! The $6.00 webcam has
Hey all! The $6.00 webcam has arrived. First impression: The imager is nice, but the lens is crap. A better wide angle glass lens IS A MUST! Works just fine so far though. The camera board must be covered, as light leaks in from the lens mount on the PC board. A housing like the one it comes in, or a shield must be used (electrical tape?) to avoid light fog. Still, this is SIX DOLLARS!!! Whoooo Hoooooo! The PC board dimensions are 30mm x 25mm. Here's a few pics:
PS; This should fit inside a normal half acrylic eyeball, or at least the 29mm variety...
(No subject)
Screen capture. Lens is
Screen capture. Lens is terrible, and narrow field. $5 or $6 will cure that...
Great, If / when you get a
Great,
If / when you get a pan tilt kit - you should be able to do tracking. You should consider a "play area" too where you can (initially) simplify the view. We'll need to start with very simple shapes on a plain background (for example, I'm guessing that black thing in front is a wireless speaker phone? - but I can not tell for sure - and that's after 6 billion years of evolution).
I had no idea you were that
I had no idea you were that old... It's a radio control transmitter Grog! ;-) I'll be getting the other stuff shortly.