My robot have a mouth now ![]()
The sequence is : Happy, Not happy, speechless, and talking .
I've made a sketch , solder it on a prototyping board and ... oh ! it work lol
The IC is a 74HC595 shift register and all resisors are 630 ohms ( More than the ohm's law say, but i did with what i had under the hand ! )
For the one that know this shift register , you must know that it is possible use few of them one behind other. So you can control a lot of leds ( or other ) with only 3 wires ( + 2 more for positive and ground )
Here is the sketch i did for my needs :
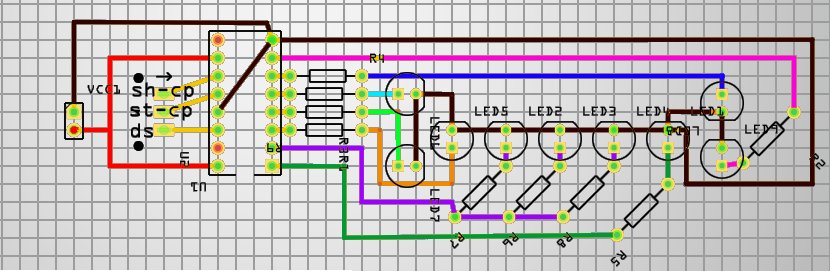
Of course the red wire is positive and the black is negative ...
For the control, i've used the arduino's IDE, i've to do this in MRL with python now but it work !
Great Work Beetle !
Yay ! ..
Speech Speech Speech ! :D
It will but , can i use the
It will but , can i use the shiftOut fonction with MRL ?
but , can i use the shiftOut fonction with MRL ?
By exemple something like arduino.shiftOut(DATA, SHIFT, LSBFIRST, chars[i]);
I've found a way, it work in
I've found a way, it work in MRL
I've made my own shiftOut fonction ... Here is my python code :
Python-Fu
Your Python-Fu is most impressive :D
I've added shiftOut to the list of things to add to the Arduino service. Thanks for this and your bot is really looking great !
it is a french robot lol who
it is a french robot lol who speak english!!!!