Simplicity Is Beauty
And the following I think is very simple
http://somehost/services/myThingy/someMethod/parameter0/parameter1/…
Unfortunately - this breaks down when there is a "/" in the parameter :(
An example of this would be
http://localhost/services/arduino/setSerialDevice//dev/ttyUSB0
instead of this being equivalent to
arduino.setSerialDevice("/dev/ttyUSB0")
it becomes
arduino.setSerialDevice("","dev"/"ttyUSB0")
and explodes, because there is no 3 parameter setSerialDevice method on arduino !
I thought about the idea of using a doubl // to escape forward slashes (very bad idea !) - for multiple parameters and this type of encoding we wouldn't know if the slash was supposed to be on the end of one param or the beginning of another :(
BUT WAIT ! - just encode it with %2F ! ... with a little bit of hacking - now
http://localhost/services/arduino/setSerialDevice/%2Fdev%2FttyUSB0
becomes
arduino.setSerialDevice("/dev/ttyUSB0")
Yay ! I think now any method in MRL which has simple primitive type parameters can be accessed with a url !
Need the python scripting engine on a remote system - no problem just use this url
http://192.168.0.2:7777/services/runtime/createService/jython/org.myrobotlab.service.Python
Update :)

Started an MRL instance with webgui & arduino (sprinklers) :)
opened the runtime - found the method createAndStart

created a clock & opencv service
looked at services again .. Low and behold !!!

Lets look what InMoov Looks like :D
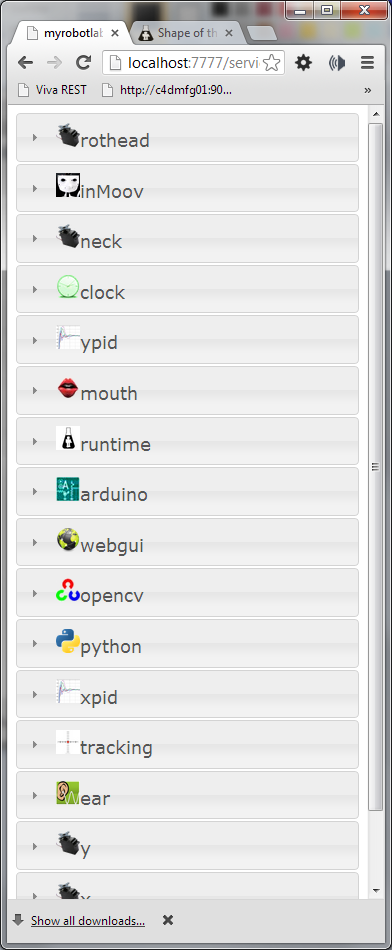

Looks like it would fit on a phone ... No ? ;)
Here's the beginning of the REST interface - showing MRL with 3 Services running...
Open one up and you can see ALL - the methods for that service ... (there are lots) - the input text boxes are parameters
.png)
Some of them have no parameters .. like detach - the goal is to get this "link" to call servo01's "detach" method...
It's getting there :)
update... a little closer...
.png)
Served from the WebGUI service http://localhost:7777/services.html
This is the Arduino menu .. gest what I want this method to do :D