
Hi this is a really quick picture of the progress I'm having. (not checked in yet)
But here I have an example of 2 MRL processes connected together, and the webgui UI showing the interleave of services.
What exactly happened ?
I started one mrl instance with id "admin", it has a webgui, runtime, and 5 clocks, then I started another mrl instances with id "r1" ... and now I can control both instances with a single webpage. WOOHOO !
In the old days with RemoteAdapter I'd have to contend with name conflicts, but there are no more name conflicts as long as mrl instances have unique id's are.
The simple services have no issue so far like clock and security. I need to do some bug fixing on runtime to get it to serialize properly. All in all I'm pretty happy with the result !
I can control all of the services from a single portal. All of this connectivity centers around the WebGui. If the WebGui was put in the cloud/internet .. multiple mrl instances could connect and inter-operate, even behind NATs
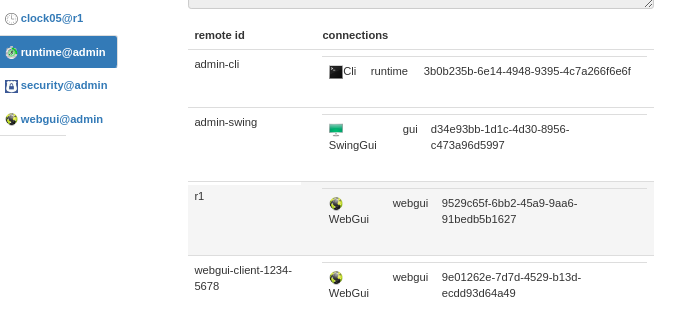
This is a list of connections in runtime@admin :
You can see admin-cli - which means I have the interactive cli running on admin
r1 is the other mrl instance and webgui-client-1234-5678 is the browser
Next Steps :
I need to get Runtime to work across the connections - and begin checking all the other services.
Then back to servo testing :)