This is exactly what I envisioned when we discussed this the other day, I'm so glad to see it working. Like Grog said, we need feedback, and to get the rest of the shoulders built around it. I'll definitely print this instead of the stepper versions.
get the latest 1.0.43 - you'll need to update MRLComm.ino (ver. 17 I believe)
Nothing works the first time. If you get no movements out of the stepper - there could be a variety of reasons. The first which comes to mind is the pulse width on the step .. currently I'm only using a micro-second delay - (according to the specs of the controller - it says this is ok - but you never know until you try)
Yes I redesign the total thing incuding lower lower torso. I think ik am master of gears now. I baught design pakage and study all type of gears. Took i while but i am ok with gears now.
.jpg)
.jpg)
.jpg)
You did it!, wow fast and
You did it!, wow fast and strong!!!
GREAT WORK ADOLPH ! Bigger
GREAT WORK ADOLPH !
Bigger Better Faster Stronger !
NEXT ... CONTROL !!!
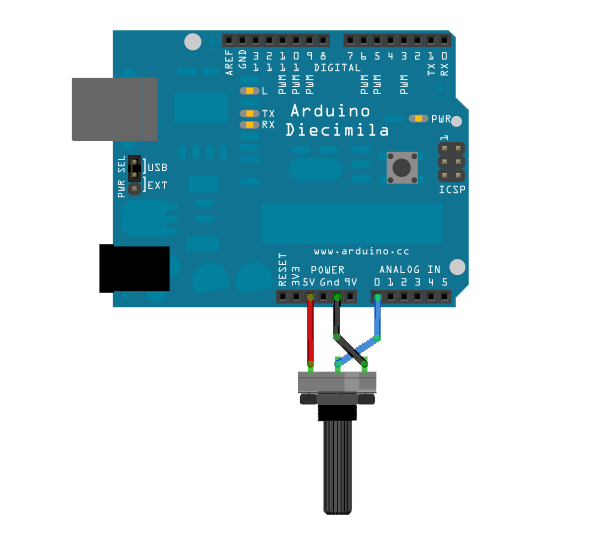
Is the next goal moving it a small amount to where you want it ?
To get there - here are a couple of possible solutions
What way are you thinking of ?
perfect
This is exactly what I envisioned when we discussed this the other day, I'm so glad to see it working. Like Grog said, we need feedback, and to get the rest of the shoulders built around it. I'll definitely print this instead of the stepper versions.
Stepper is published with
Stepper is published with test script - http://myrobotlab.org/service/stepper
get the latest 1.0.43 - you'll need to update MRLComm.ino (ver. 17 I believe)
Nothing works the first time. If you get no movements out of the stepper - there could be a variety of reasons. The first which comes to mind is the pulse width on the step .. currently I'm only using a micro-second delay - (according to the specs of the controller - it says this is ok - but you never know until you try)
Good luck ! :)
Adolph, did you put the
Adolph, did you put the planetary gear inside?
Yes I redesign the total
Yes I redesign the total thing incuding lower lower torso. I think ik am master of gears now. I baught design pakage and study all type of gears. Took i while but i am ok with gears now.
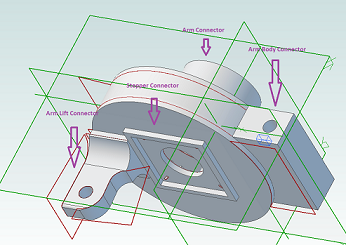
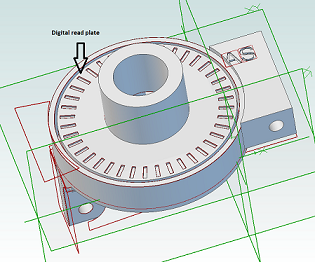
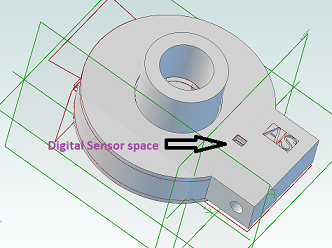
Your encoder design looks
Your encoder design looks great Adolph !
Did you have a chance to test the Stepper servicee - http://myrobotlab.org/service/Stepper