.png)
Starting with bhoustons video of counting fingers. VInMoov uses Gael script as is with only virtual ports added. Bhouston's servo mappings & Gaels may be different, VInMoov uses Gaels mappings.
Starting with a video of the master and some basic calisthenics
Ran Ginormous Script this was madeby method .. some things I noticed.
- torso is 90 degrees out of phase
- shoulders are 180 degrees out of phase
- sound is out of phase with mouth movement - should use realtime sound filter with events to move jaw
- neck is inverted
- no finger bones
- But it Sort Of Worky ! :D
|
moveHead(114, 90);
moveArm("left", 90, 91, 106, 10);
moveArm("right", 0, 73, 30, 17);
moveHand("left", 170, 0, 0, 168, 167, 0);
moveHand("right", 98, 37, 34, 67, 118, 166);
|
moveHead(66, 79);
moveArm("left", 89, 75, 78, 19);
moveArm("right", 90, 91, 72, 26);
moveHand("left", 92, 106, 133, 127, 107, 29);
moveHand("right", 86, 51, 133, 162, 153, 180);
|
 i01.hello() 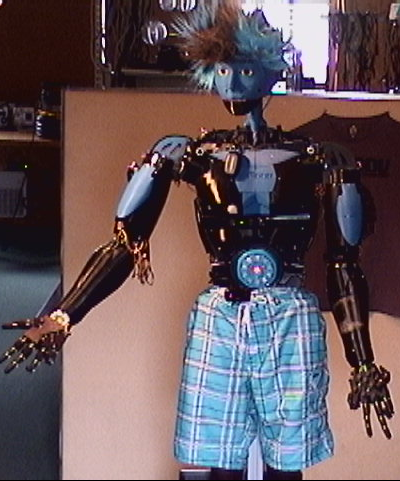
setHeadSpeed(1.0f, 1.0f);
setArmSpeed("left", 1.0f, 1.0f, 1.0f, 1.0f);
setArmSpeed("right", 1.0f, 1.0f, 1.0f, 1.0f);
setHandSpeed("left", 1.0f, 1.0f, 1.0f, 1.0f, 1.0f, 1.0f);
setHandSpeed("right", 1.0f, 1.0f, 1.0f, 1.0f, 1.0f, 1.0f);
moveHead(105, 78);
moveArm("left", 78, 48, 37, 10);
moveArm("right", 90, 144, 60, 75);
moveHand("left", 112, 111, 105, 102, 81, 10);
moveHand("right", 0, 0, 0, 50, 82, 180);
|
|
moveHead(44, 82);
moveArm("left", 15, 55, 68, 10);
moveArm("right", 13, 40, 74, 13);
moveHand("left", 61, 0, 14, 0, 0, 180);
moveHand("right", 0, 24, 24, 19, 21, 25);
|
moveHead(160, 97);
moveArm("left", 9, 85, 168, 18);
moveArm("right", 0, 68, 180, 10);
moveHand("left", 61, 38, 14, 38, 15, 64);
moveHand("right", 0, 0, 0, 50, 82, 180);
|
new rest picture with hands attached - can't find dem finger bones ! I found out atEase() is rest() + detach() .. I'll get rest coordinates shortly... |
|
MAKE NOTE - this is a arm breaker for Azule !
moveHead(138, 80);
moveArm("left", 71, 41, 20, 39);
moveArm("right", 71, 40, 14, 39);
moveHand("left", 161, 151, 133, 127, 107, 83);
moveHand("right", 99, 130, 152, 154, 145, 180);
|
?? need to check
moveHead(99, 82);
moveArm("left", 9, 115, 96, 51);
moveArm("right", 13, 104, 101, 49);
moveHand("left", 61, 0, 14, 38, 15, 0);
moveHand("right", 0, 24, 54, 50, 82, 180);
|
moveHead(75, 79);
moveArm("left", 9, 115, 28, 80);
moveArm("right", 13, 118, 26, 80);
moveHand("left", 61, 49, 14, 38, 15, 64);
moveHand("right", 0, 24, 54, 50, 82, 180);
|
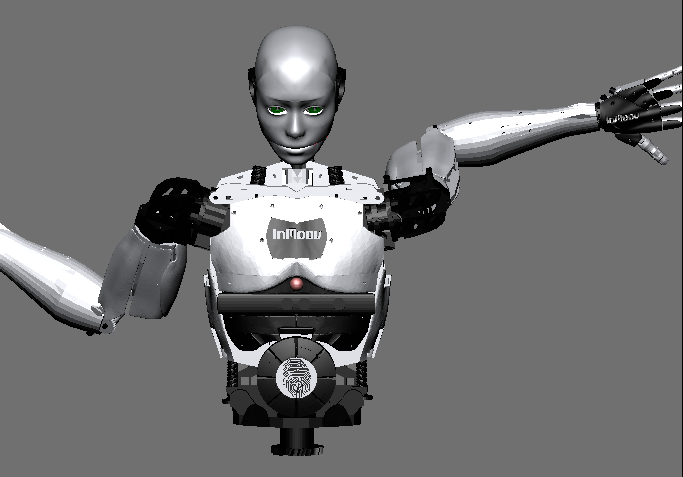
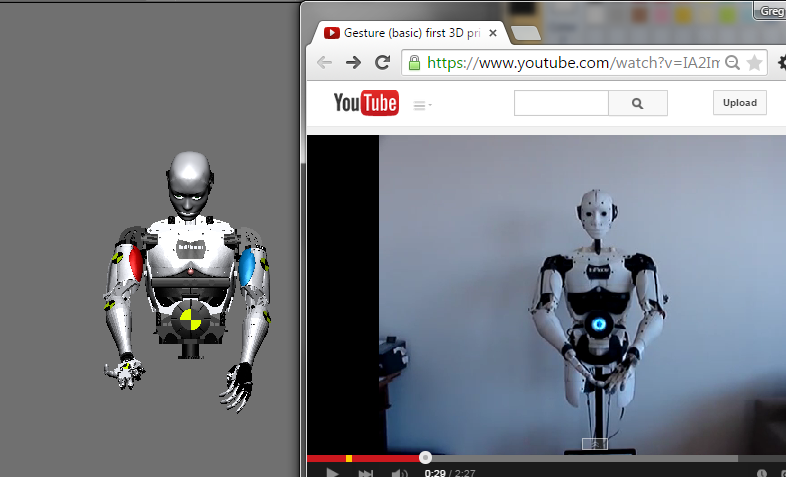
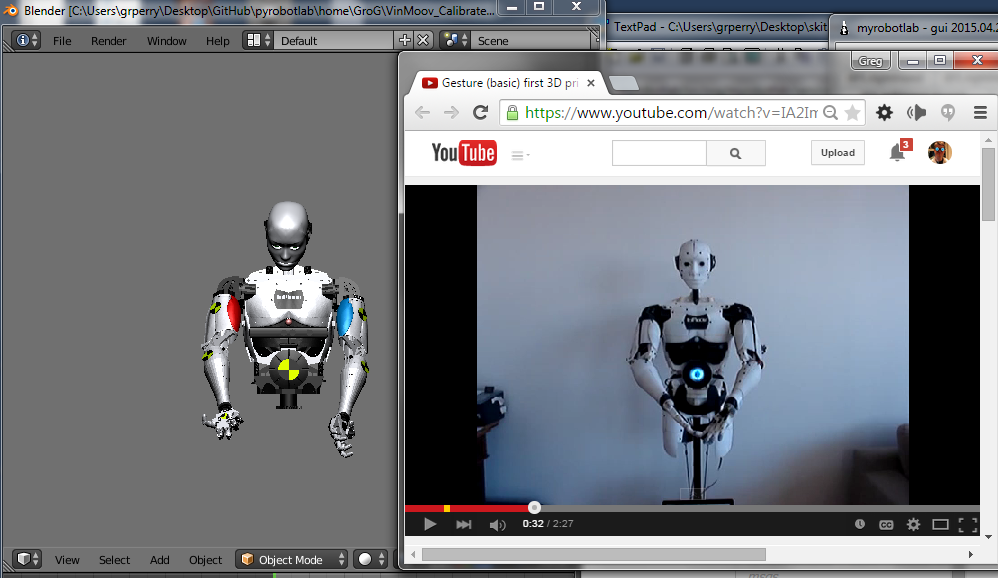
.png)
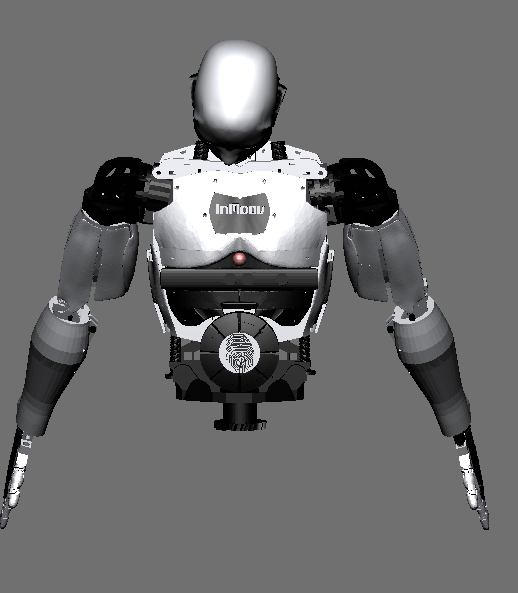

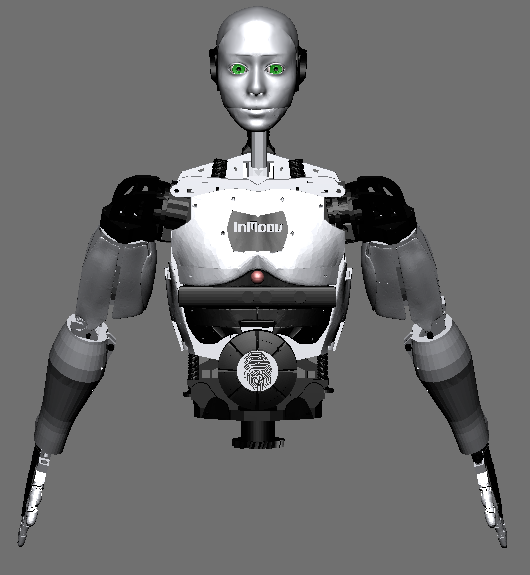
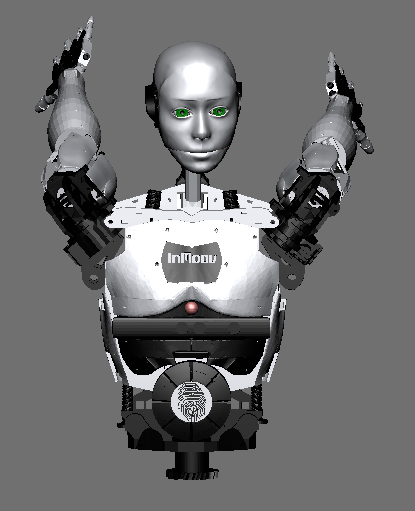
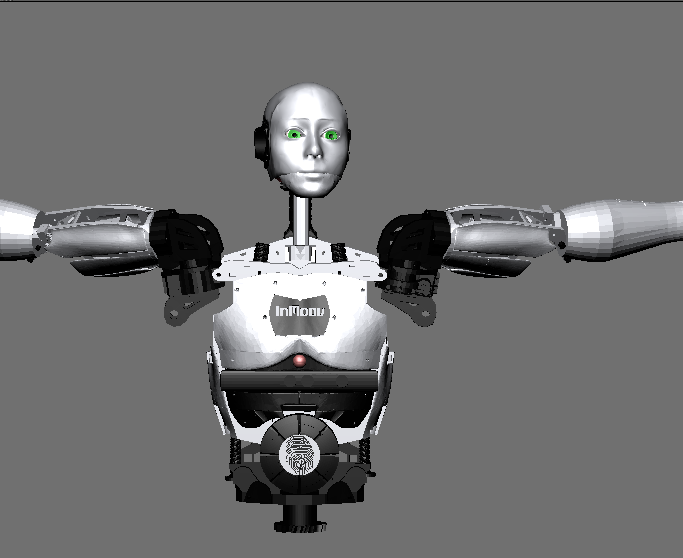
Here are some screen shots from the virtual InMoov - I found some embedded poses which I thought would be more stable to calibrate a real Inmoov with it's virtual cousin. Theoretically - position of a real camera and the virtual camera should be the same, but before the detailed work - some things are very out of whack. The rotation of the shoulders are 180 degree off. Small differences I can compensate with Servo.map methods - but I have issue if I need to go past a 0 origin. a 90 degree flip will happen.
I think some servos need reversing too, but I do not know the direction of each servo...
Many thanks to Gareth for all the rigging, tweaking and his amazing Blender-Fu. And of course thanks to Gael and the artistry of InMoov !
Left is Right and Right is Left ? Is this the "Right" way of a real InMoov (are the servo values to rotation correct?)
Finding its feet!!
Nice.... ohoh.hooooo.
I kinda calculated the arm reverse, it was a 50/50 guess if i had it correct.... and also not sure if 90°>110° should "supernate" or "Pronate" the hands&arms or 110°>90° .... and if 90°>110° was mirrored to the other side or reversed. (I have it "in hand"..... pun intended).
No worries now that I have the virtual Uarts running with Eclipse it will be simple task to tweak... thanks Serial_Fu Grog.
Build Variation and Calibration between Servos for InMoov
I think we need 2 parameters per servo to calibrate the inmoov
1. the initial joint offset.
2. rotation gain
this can adjust for gearing ratio differences and can also provide the inversion.
The resulting angle could then be a matter of "gain and phase shift"
Theta(out) = Gain * Theta(in) + Offset
or Maybe
Theta(out) = Gain * (Theta(in) + Offset)
Or something like that...
For servos that are inverted, the gain can be -1.0
If all real world inmoovs compute those 2 parameters for each servo, I think all movement can be calibrated.
thoughts?
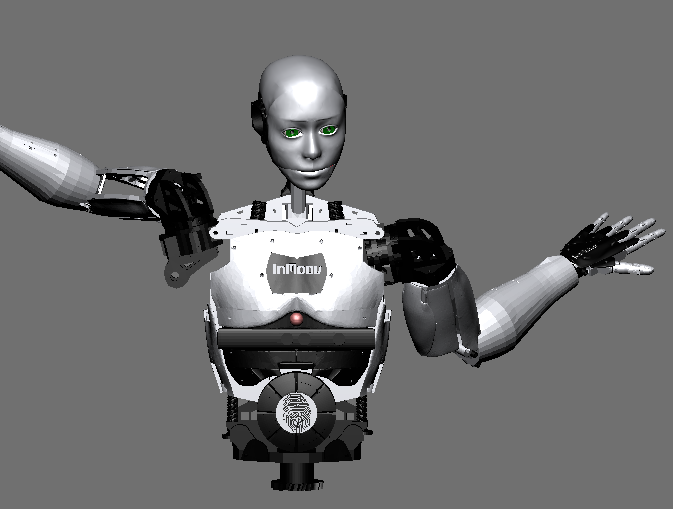
vInMoov - Grab the Glass
virtual inmoov doing the "grab the glass" gesture.. gotta work on that a bit...
This is the current
This is the current calculation for given maps
arm/hand protocol
and just as a relevent parking space here to document... it was new syntax for me..
command :-
moveHand("left",92,106,133,127,107,29)
translates too :- move servo° to (thumb,index,majeure(middle),ring finger,pinky,wrist)
and
moveArm("right",13,118,26,80)
= move servo° to (bicep,rotate arm,rotate shoulder,omoplate)
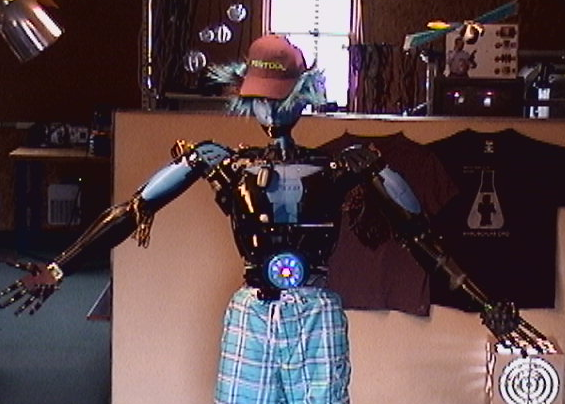
Making Progress ! I posted
Making Progress !
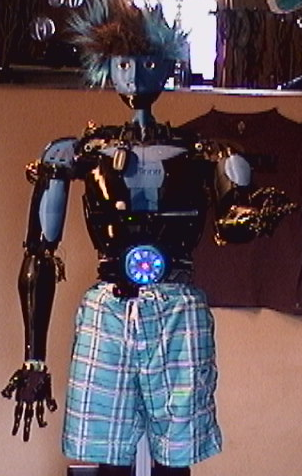
I posted the "real" photo shoot thanks to Harland & Azule ..
and the coordinates of most of the gestures
naming finger joints needs to be done .. would be glad to do it .. but was wondering Gareth's input on the 3 joint to string problem...
SERVO_WRITE [2, 2] ERROR can't find bone i01.rightHand.majeure Arduino Msg Method # -> 31 SERVO_WRITE [3, 2] ERROR can't find bone i01.rightHand.ringFinger Arduino Msg Method # -> 31 SERVO_WRITE [4, 2] ERROR can't find bone i01.rightHand.pinky Arduino Msg Method # -> 31
mebbe I'll try a simple 1st joint = servo to start with...
IK
I think its possible to use a blender IK linkage to bind them together.... its "on my list"....
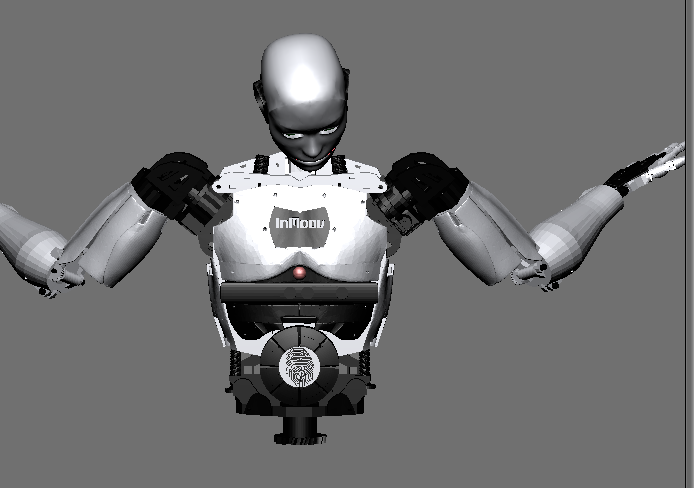
1/2 daVinci
Think i have dialed in left Arm .... here is my daVinci now....
Great work gareth...wrist
Great work gareth...wrist need to be rotated, palm of the hand needs to point down
More picts from Harland
More picts from Harland
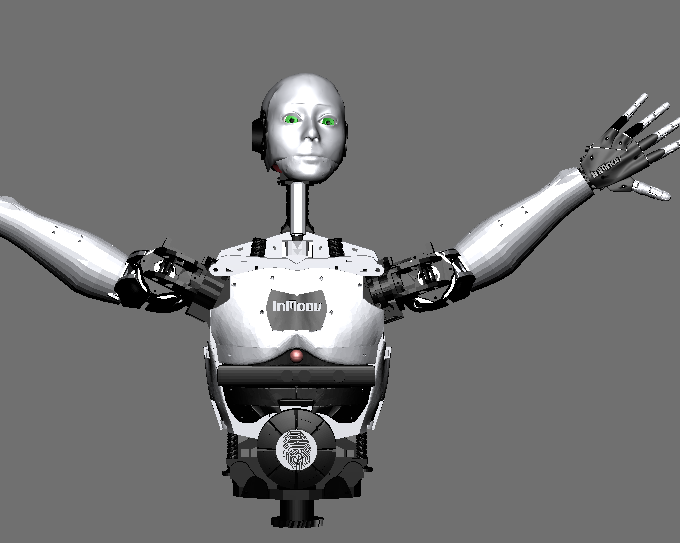
Gael's Basic end positions for the various gesture
You nailed it Gareth -
You nailed it Gareth - looking really good .. and now with view control ! o/
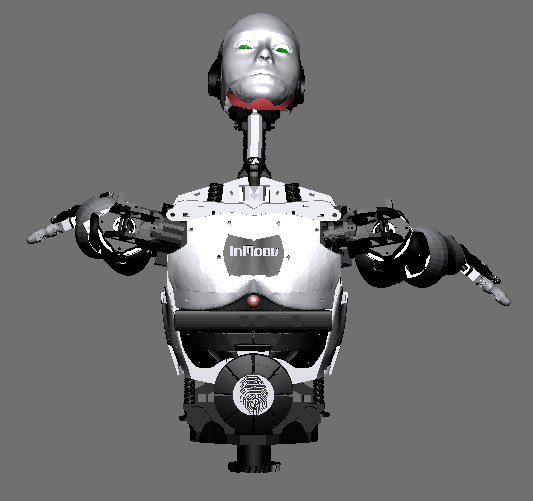
Crash Testing almost over .....
"Crash Test Version" .... featuring a Gesture set and real-time camera direction control & zoom.
Getting closer by the minute.....