![]()
Gael wrote,
"I use the inmoov-develop which is what I recommend to builders now, because of the ease of the configurations.
I have modified many times the gestures to launch face tracking and at some points( or MRL version) it sometimes worked and then with further releases my gesture would be out of function.
Here is the link to the current gestures:
https://github.com/MyRobotLab/
https://github.com/MyRobotLab/
https://github.com/MyRobotLab/
And face recognizer
It was working great when I modified these gestures, but I haven't tested recently due to OpenCV not setting the filters.:
https://github.com/MyRobotLab/
https://github.com/MyRobotLab/
https://github.com/MyRobotLab/
I started a Tracking service with a virtual Arduino - (I'll repair my pan/tilt kit soon). It appears to work in that all the services started up. It connected to the virtual arduino, the filters & face detect started, opencv started, all appeared worky so far.
It would be helpful if some InMoovers could test this, I'm at a bit of a disadvantage without a "real" inmoov. It would help also if there was any detail regarding "gestures being out of function". Did they do nothing? Errors ? Something Else ?
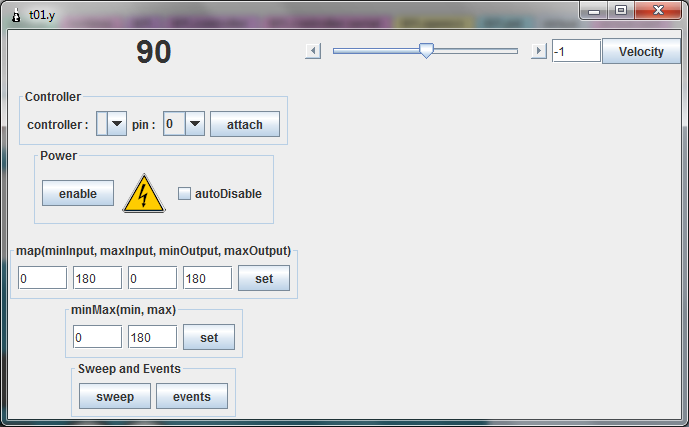
Ok .. starting to see some problems. The Servo gui has changed a lot ! More stuff exposed, which is a good thing. Might be nice to re-arrange some of the items. When I start, the pin, nor controller is set on the Y axis servo. Also on the X when I enable the servo (seems disabled initially) - it autoDisables, but the autoDisable checkbox does not reflect that.
Thank you Grog, i check when
Thank you Grog, i check when i can do.
For the facerecognizer, do you add face detect coordinate ?
Good work.
hairygael: Unfortunately face
I
It was working for me (see
It was working for me (see picture above) .. and I get the same results as you Gael now ...
Not sure what happened, I looked at the calculated value when I was doing a test to center LK tracking -
The filters are correct, the value calculated was 87 and the center was 90 .. but the servo "ADDS" the 87 producing crazy big location for servo to go to ...
The PidTest is worky - although its a crazy simple test ...
This will need more research - feels like I fix it and it keeps getting unfixed :(
Must be an evil ghost...