My first test successfully ... all with the help of the developers of the MRL.
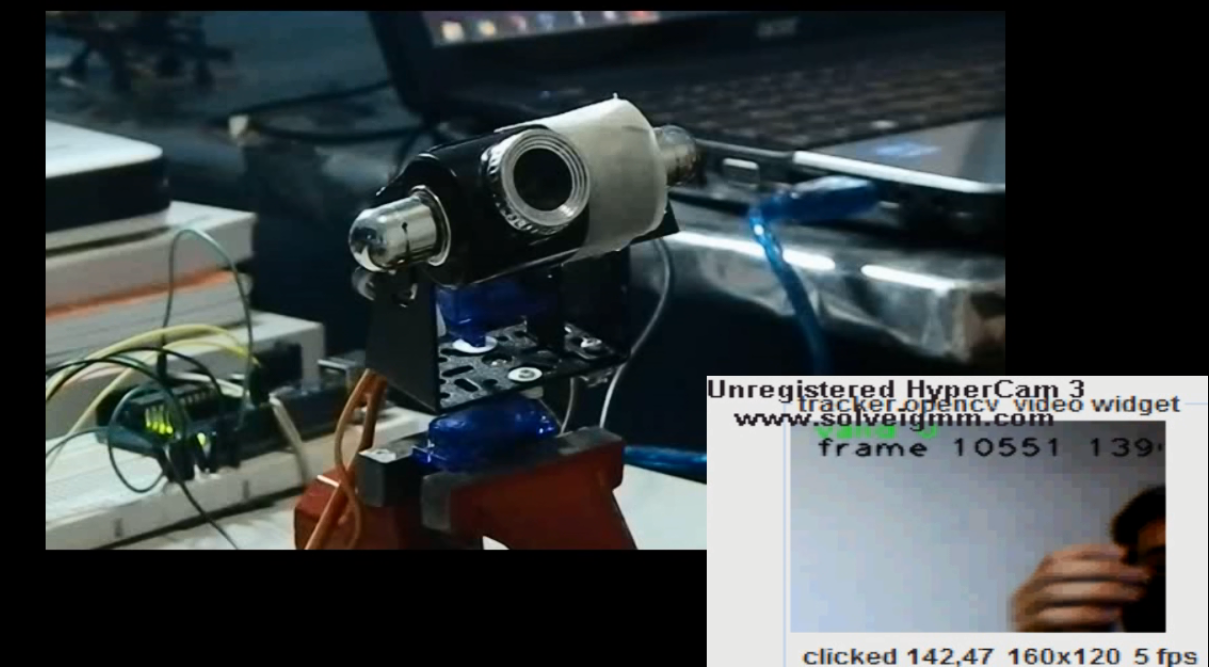
As you can see .. More than 10 000 frames .. all that to properly configure the Pan / Tilt hahah
As you can see .. More than 10 000 frames .. all that to properly configure the Pan / Tilt hahah
I can only thank .. and let's work!
WOOOHOOO ! High Five o/
WOOOHOOO !
High Five o/
\o hahahah #More Stepsssss
\o hahahah #More Stepsssss
Nice :)who hooo :) which
Nice :)who hooo :) which script you used?
The basic Script...
This is the script I used to work, past in Python service:
port = "COM3"
xServoPin = 7
yServoPin = 6
tracker = Runtime.createAndStart("tracker", "Tracking")
# set specifics on each Servo
servoX = tracker.getX()
servoX.setPin(xServoPin)
servoX.setMinMax(30, 150)
servoY = tracker.getY()
servoY.setPin(yServoPin)
servoY.setMinMax(48, 180)
# optional filter settings
opencv = tracker.getOpenCV()
# setting camera index to 1 default is 0
opencv.setCameraIndex(1)
# connect to the Arduino
tracker.connect(port)
# Gray & PyramidDown make face tracking
# faster - if you dont like these filters - you
# may remove them before you select a tracking type with
# the following command
# tracker.clearPreFilters()
# diffrent types of tracking
# simple face detection and tracking
# tracker.faceDetect()
# lkpoint - click in video stream with
# mouse and it should track
tracker.startLKTracking()
# scans for faces - tracks if found
# tracker.findFace()
Great Video!
I like the picture in picture effect. The funny thing was that I was watching the video of the ball and thinking, "nothing is happening" and then I glanced back over to the pan-tilt camera and saw it was moving around. Duh! If it's working correctly, the ball should look like it's not moving. I guess if the wall had more features on it I wouldn't have been tricked.
It was interesting that the camera followed the ball even after it saw your face. I'm guessing the tracking was tied to the lkoptical filter and not the face detect filter.
Great job. Keep up the good work. You've done more with MRL than I have so far.
hohoho Thanks!!