At last everything has come together ...
This is just a stepover project to prove the roundrobin of adding ESP8266 WiFi modules to remotly control Stepper motors and other cool stuff.

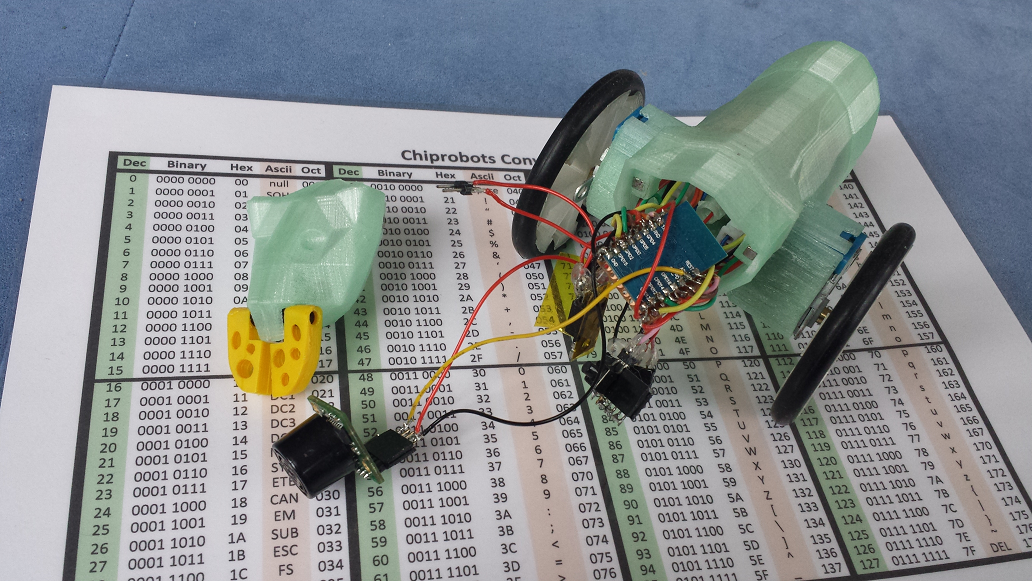
Starting with the On/Off switch, it is a split Swiss cheese magnet which operates a reed switch behind its sharp teeth.
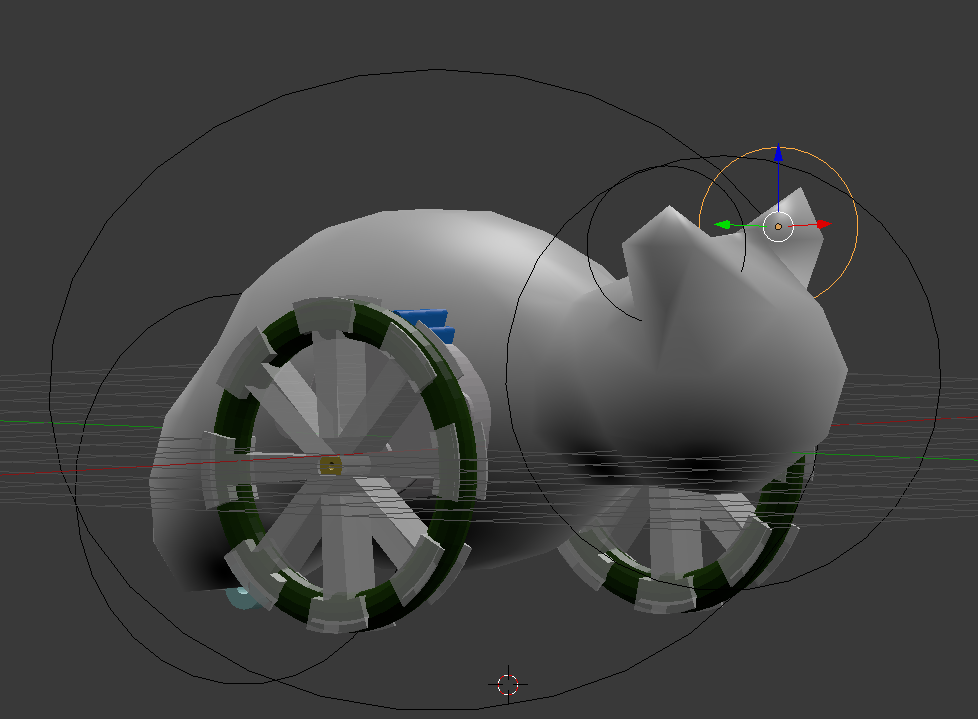
The Hamster body parts were designed in Blender using Meta-Balls.
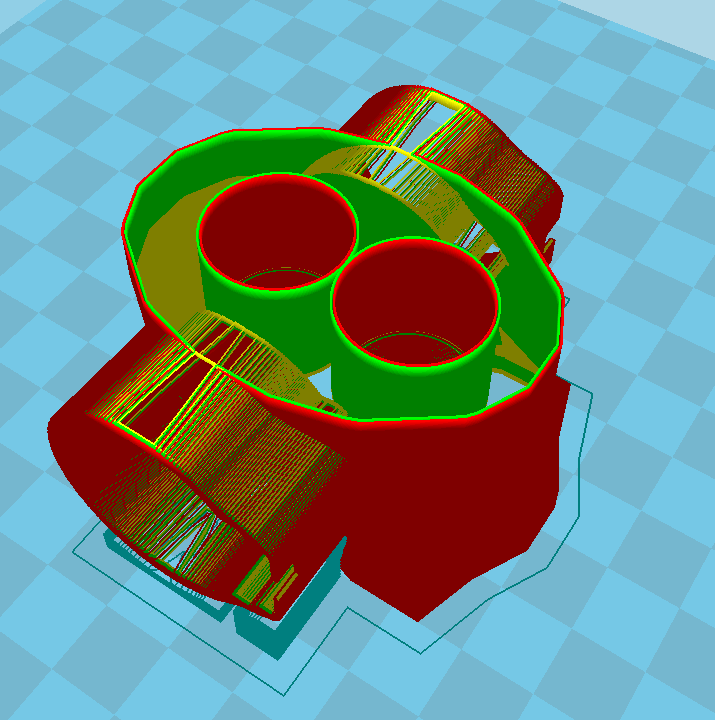
......and cured in Cura....
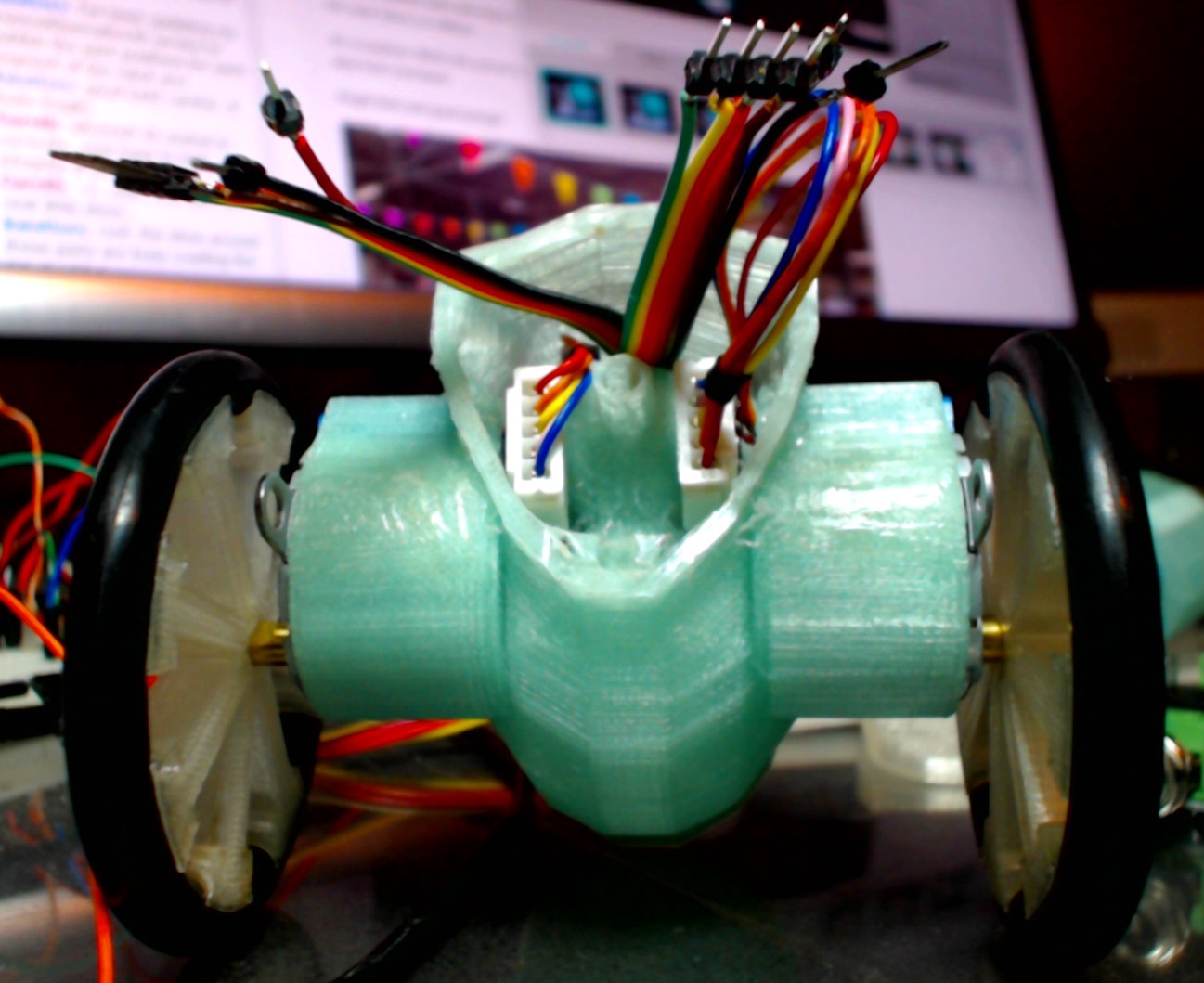
... notice the middle circular cavities which house 2x 3000mAhr 18650 lipo cells (mumpf-mumpf)
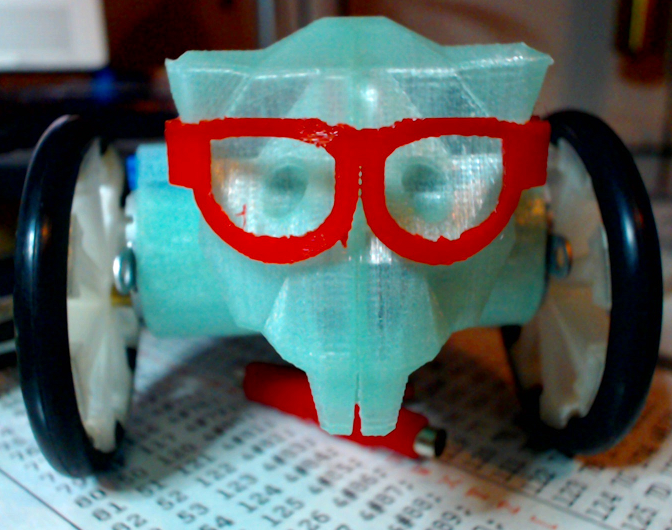
I printed it in Glow PLA ....so it will creep you out if caught un-awares,,,,,

.png)
The hamster is short sighted , so I crafted a pair of rose coloured spectacles for it.
Design time :-

Real time :-
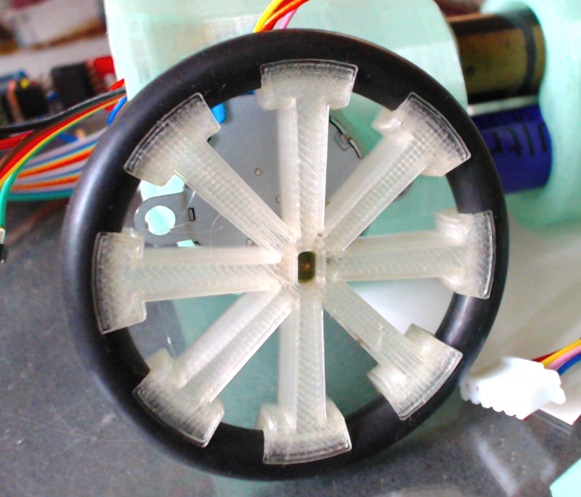
The wheels troubled me .... as I wanted paws...... so a compromise was made with a spoke effect with rubber o-rings for wheely good traction.
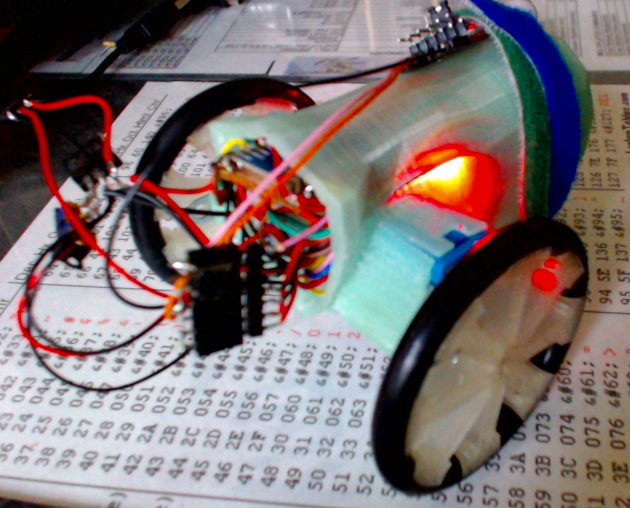
At the heart of the Hamster sits an ESP8266 WiFi module series 12 which controls two stepper motors.
The red/orange glow you see are the stepper drivers (neat that each phase has a LED, great for debug)
The ESP8266 is programmed using the Arduino IDE (please refer to my walkthrough on how todo this)
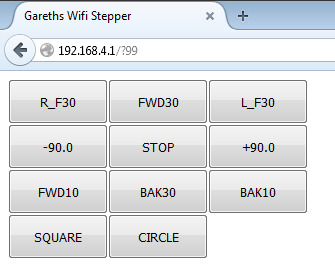
The program enables the Hamster to host its own standalone server which which you can access from another WiFi enabled device.
I am using my netbook to access the Hamster software , when linked the hamster transmits its web gui (a bunch of click-able buttons) back to my net book where it can be controlled.
Code (provisional) can be found here <ESP8266 Hamster Code>
Now I want to intergrate it into MRL ..... where to start......
UPdate 20160205 :- Maxbotics distance sensor attached