
.jpg)
 |
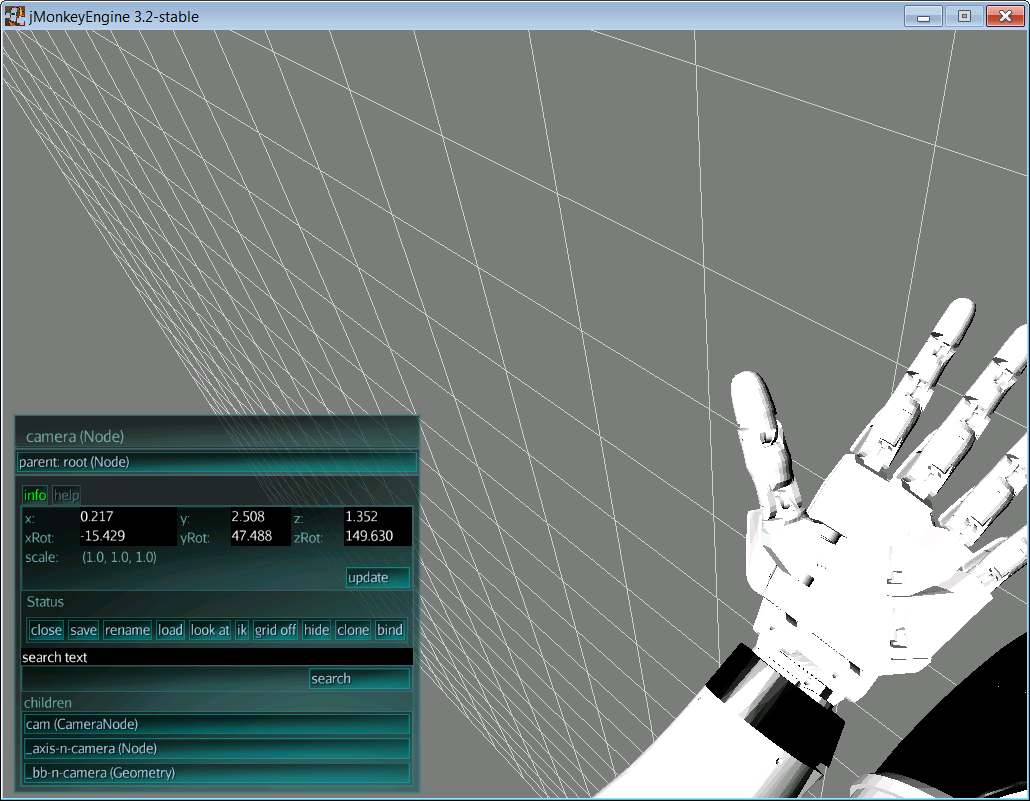 |
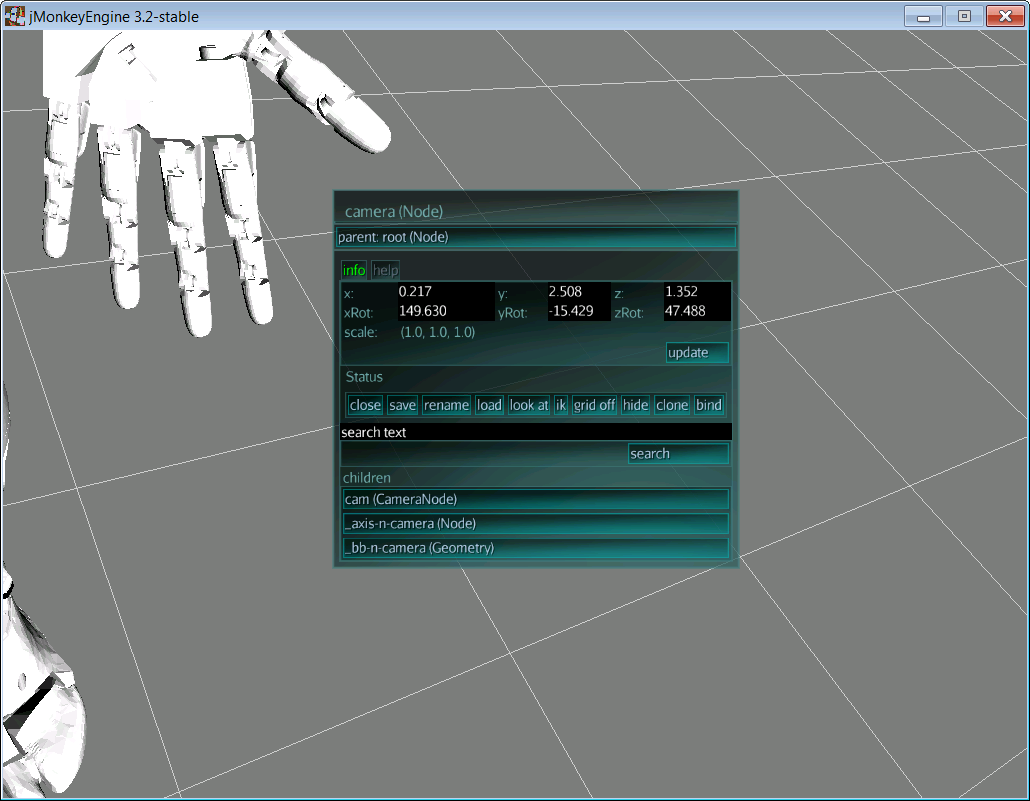
| manually moved camera to observe "snap" problem in fingers |

initial - geometries "initially" loaded from j30 files - no movement applied
I am trying to making inmoov hand using leap motion with the help of myrobotlab.
But myrobotlab is not working properly as when ever i upload the python script it shows me the following errors
in myrobotlab 1.0.2693 manticore
1.Arduino>MRL bad magic number 0-9
2.inmoov right hand is not connected
Hello everybody,
I have got a problem with starting myrobotlab.
SwingGUI is OK, every services start OK,
but jMonkey Engine 3.0 doesn't work - blaсk window witch is not responding.
I tryed start in two other computers, but the result is the same.
What can be the cause? How to fix the error?
I have sent log by "no-worky" service.
Thanks
Very impressive video of Open Pose processing. Towards the end the go into the algorithm stack.

Now, before I get any further, I'd like to know exactly how bad of an idea this is.