Hi core team,
We are facing problem with the hand assembly.
The Rotate servo and bicep servo moves continuously in clockwise for any command.
is there need any calibration of position of the servo and potentiometer.
thanks in advance.
Hi core team,
We are facing problem with the hand assembly.
The Rotate servo and bicep servo moves continuously in clockwise for any command.
is there need any calibration of position of the servo and potentiometer.
thanks in advance.
nVidia recently announced a whole line of system of a chip boards (similar to the raspi) that help showcase the nVidia GPU. These boards are based on an ARM 64 bit CPU architecture and coupled with an nVidia GPU. (The Nano has a 128 core maxwell GPU.) It's got 4 GB of ram, and uses a standard microSD card for it's main system storage (by default.)
Hi,
I'm currently trying to use MRL to make somes test with Inmoov. The problem is that each time I launch MRL, I have this message : "could not create service python Python". Unfortunately I can't execute any code with the python service.
I tried to relaunch the service and to reinstall MRL but I still have this problem. The others services seems to work, I already used serial and servo.
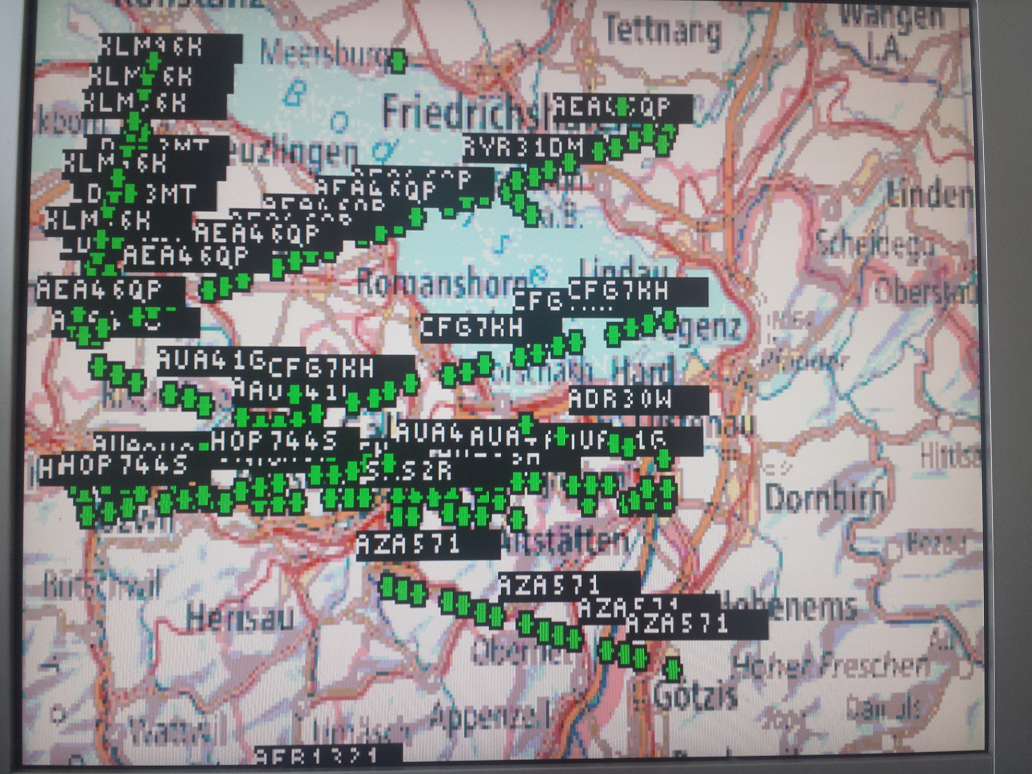
Here is an early look at a system I am putting together to prewarm me of any special/unusual aircraft that will be flying in my locality.
The system uses a few different protocols via the OpenSkyNetwork.
Just started printing out the head where I'll utilize a Maixduino, with stereoscopic eyes and a 6+1 mic platform, for its brains.
Further plan to use the Jetson Nano with its 132 cores as a master talking to the Maixduino and ESP32s (as remote local controllers). One each ESP32 to control, hand/forearm(x2), Leg, Torso. 9DOF processor for stability, and air quality sensors.
Trying to build it so I don't have wires/cables hanging everywhere, all I have to do is route power.
I'm also thinking about an inductive charging system.
Here's kwatters Harry.py

He splits the UI apart with undock in the script and uses the Servo mixer .. nifty !
I made undock and dock but never setPosition(x,y) or setSize(width, height) ...
Would be nice to have the new configuration auto-magically generate that script.
Here is a test of a flexible P4 RGB LED 64x32 matrix screen.

My trusty "Conway's Life" program was used as the test culprit along with a variant of the
adafruits P3 matrix driver Library (arduino/mega/etcetc)
Link worth saving from the shoutbox.
If you need to literally display things out of an ESP32 then well recommended is Bitluni's ESP32Lib library.

14-Bit colour Max Headroom is displayed with the ESP32's 3D Graphics Engine, STL file that has been Low_poly_ed to 5000 Triangles.