Next version 'Nixie' is coming soon !
Help us to get ready with MyRobotLab version Nixie: try it !
.png)
.png)
Not checked in but making some progress with Pingdar - there was a considerable amount of "clean up" form the original WiiDar radar display.
Some things that I noticed - there is alot more range events per single servo move.
This tutorial is for lubuntu but must work with other banana pi os ...
If your Banana Pi is just out of the box, you will need to install Lubuntu os on your SDcard. Follow this tutorial to do it : http://www.lemaker.org/resources/9-39/banana_pi_quick_start_guide.html
Once it's done, use the password bananapi to log in the user bananapi .
Let's go !
run the program start menu -> system tools -> synaptic package
A quick tuto how to make a flex-sensor.
Please take more time to make a nice one ;-)
Hi,
I still have problems with this raspberry bananapi ! under Lubuntu, but i've also tried with raspian,arch linux, and fedora ...
MRL arduino service can't find any Com port . But the arduino IDE find 4 com ports and work well ( i've uploaded the MRLComm.ino file without problem).
I still have no sound with audiofile service . The MP3s located in MRL/audiofile folder play well with gnome Mplayer
I've seen The bananapi work with an ARMv7 and the MRL service work with ARMv6 , is it a problem ?
any ideas for help me ?
Thx
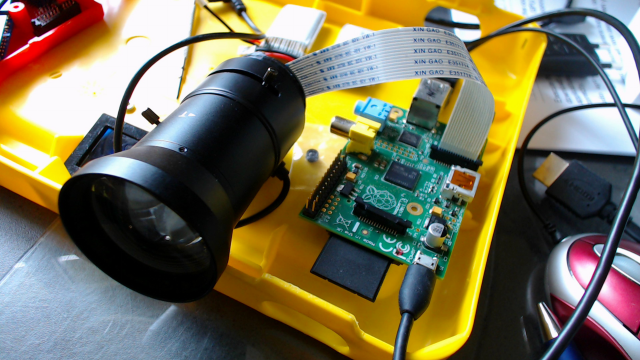
Although the stock lens is sharp ..... it lacks that spycam aspect.......
There are loads of fixed lenses out there ... however nothing beats a good zoom lens.
Ebay Search string (F1.8 1/3 Inch CS Mount 5.0-100mm DC Auto IRIS Manual Zoom CCTV Lens)
Just for fun I installed a gopro as a 2nd eye, connected to an eagle tree osd and the eagle eyes for google earth live tracking. Running 2 opencv services in the script I can still do the tracking and change eyes left to right or right to left. The eagle eyes has 4 a/v outputs so I can use another screen. Parameters can be changed at the osd, even some sensors could be added.
I found a very exciting paper on a full size robot, the RH-1 and it describes walking and control, and maybe it is interesting for the inmoov robot. But there are parts that would be interesting for other robotic platforms, and services.
i will use a link, its a long paper.
this is the link http://cdn.intechopen.com/pdfs/12296.pdf